salut
donc voici les photos promises de l'intérieur du compartiment étanche, si vous pouviez me trouvez de la place
pour ajouter un servo pour mes barres avant ,ce serait cool
Chaque photos renvoie sur une plus grande, et j'ai mis des liens sur mon site pour les détails du matériel utilisé
donc ont commence par l'arrière vue de dessus
le récepteur, les deux servo (barre de plongée et gouvernail) ,le correcteur d'assiette d'
Alexandre et le capteur de pression de
SISUS
---------------------------------------------------
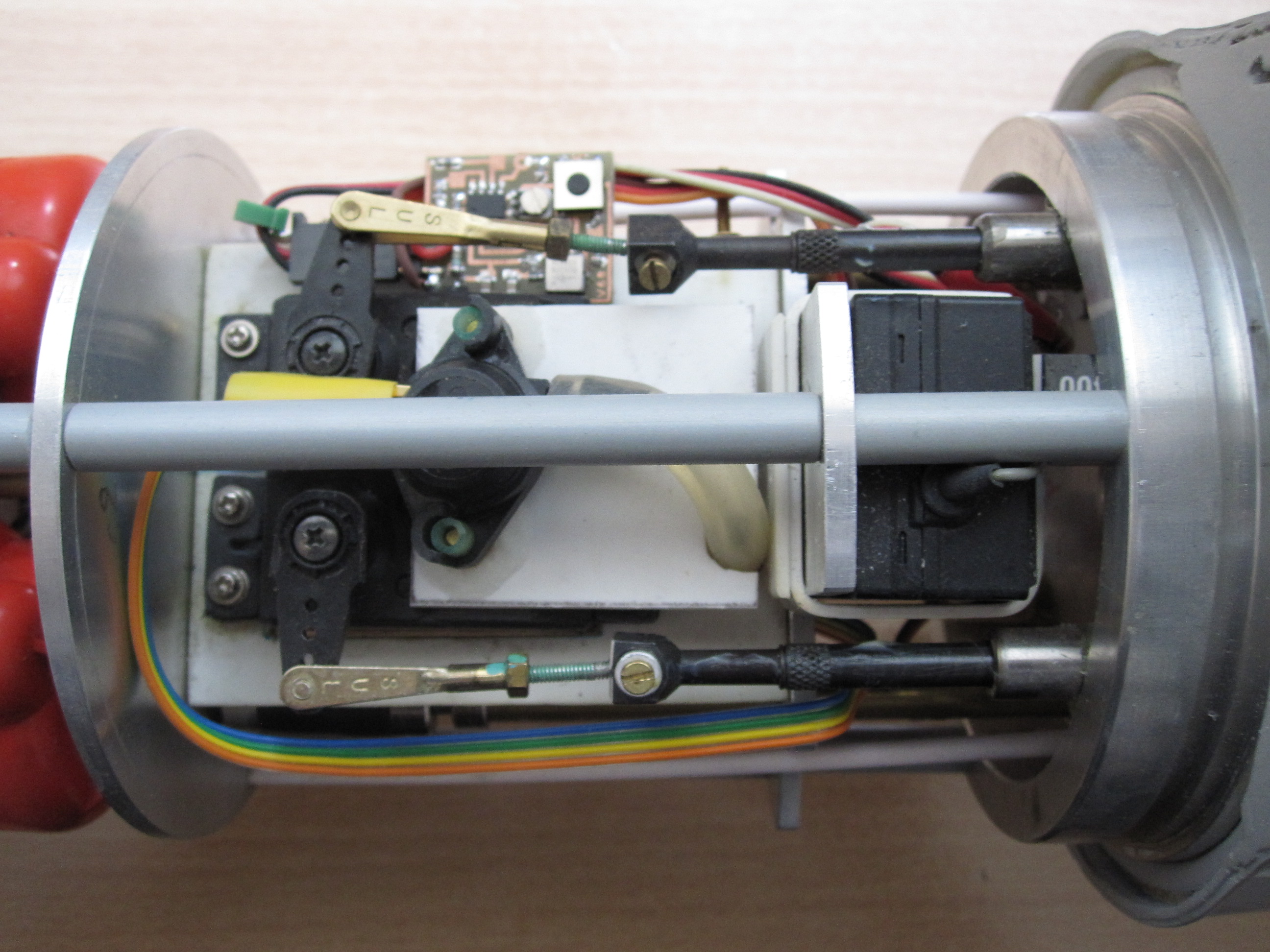
Vue de dessous,un tuyau pour la pompe,l'autre pour le capteur de pression,entre les 2 le récepteur,ensuite le circuit de
SISUS
qui permet en fonction de la profondeur atteinte de mettre la pompe en vidange ballaste et a gauche le détecteur d'entrée d'eau
au fond du tube étanche et ont voit aussi un cardan
---------------------------------------------------
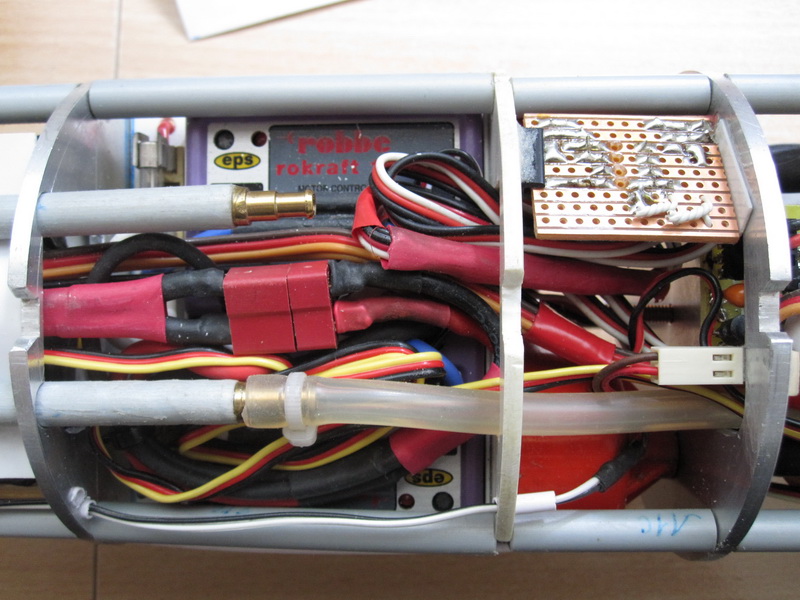
toujours vu de dessous,de droite a gauche, le
mixer pour les moteurs qui me permettra de commander
les deux moteurs pour faire de
jolies manœuvre a quai,le raccordement au détecteur d'entrée d'eau
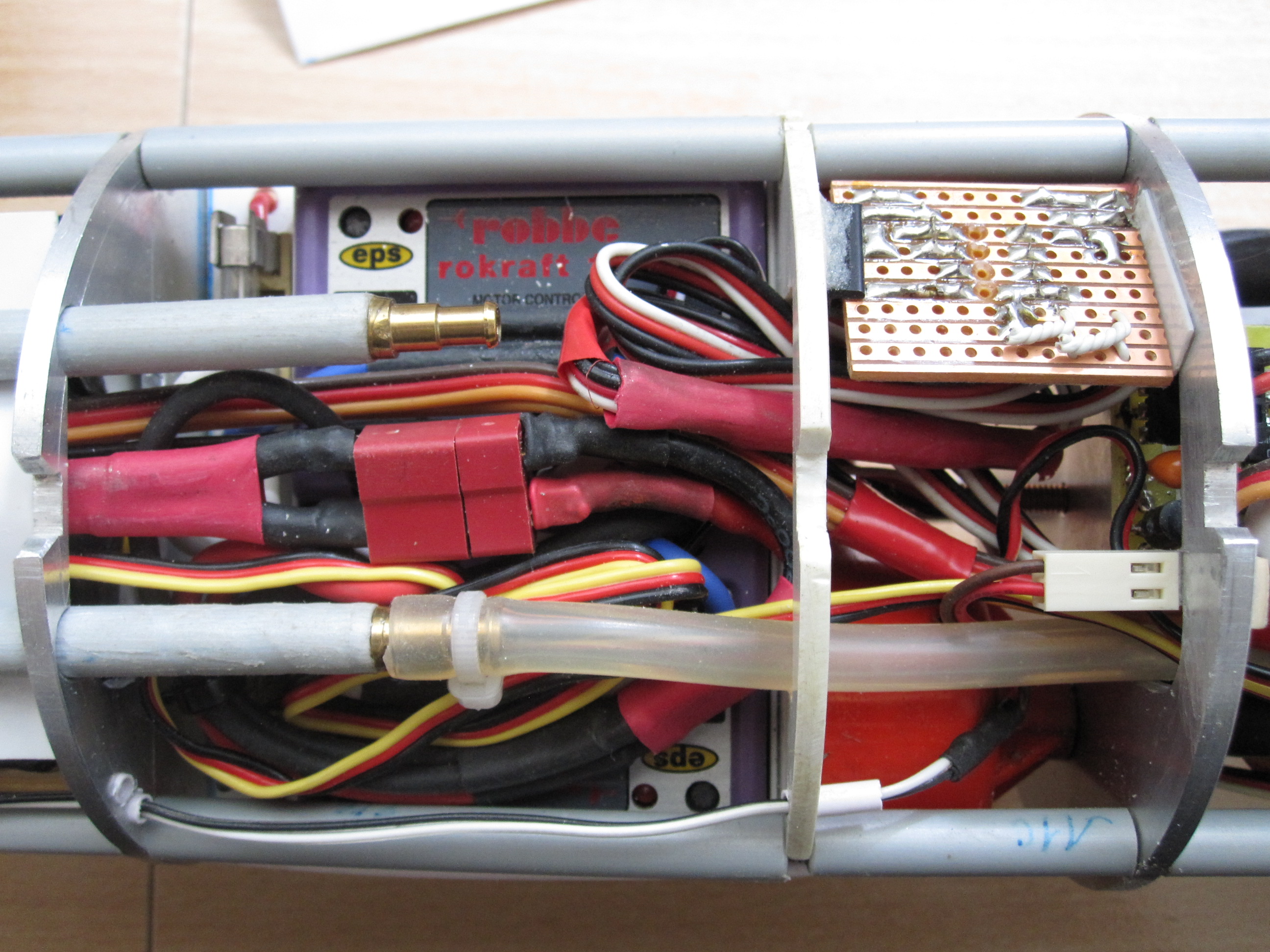
ensuite vers la droite , les deux variateurs ROBBE, un des 2 fusible qui protègent les variateurs, et le raccordement du tuyau
de la pompe a un tube rigide
---------------------------------------------------
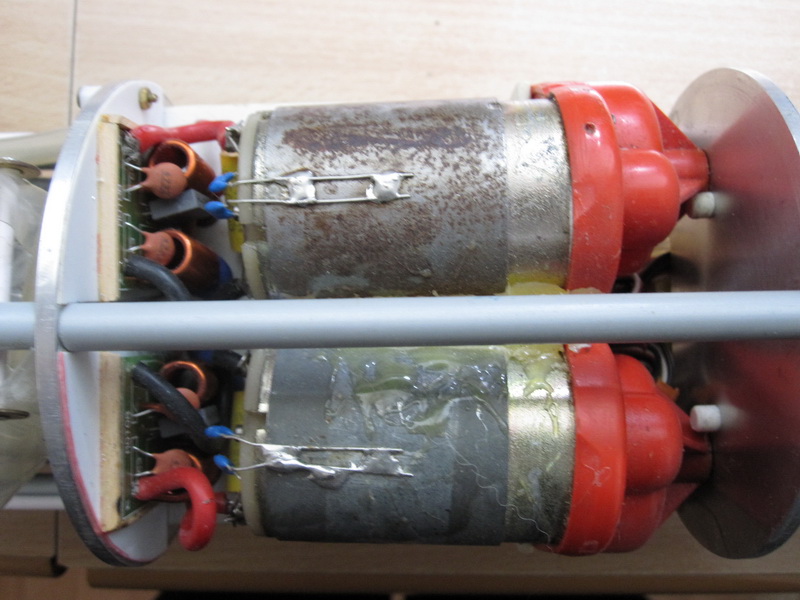
vue de dessus, les deux moteurs (vieux mais costaux) avec les deux antiparasites
---------------------------------------------------

le compartiment le lus grand situé au milieu, la poche baxter avec le coupe circuit de la pompe en cas de remplissage
qui risquerait de faire péter le baxter

---------------------------------------------------

Vue de coté;
Le tube blanc, c'est pour la commande du périscope qui part de l'arrière et qui sort a l'extérieur du tube, il y a la même de l'autre
coté, mais c'est pour la coupure générale
et en noir c'est la batterie
9.6volts 7 amp, simplement posée sur les 2 tubes rigides
---------------------------------------------------
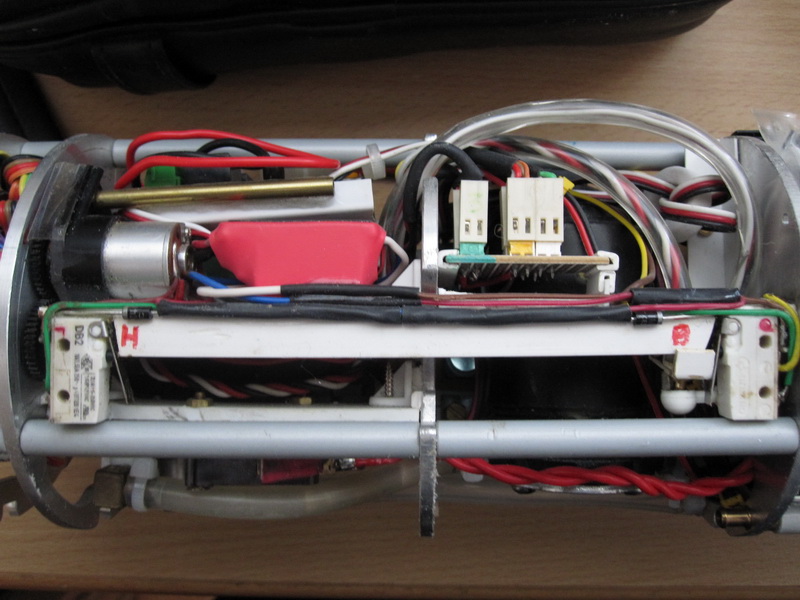
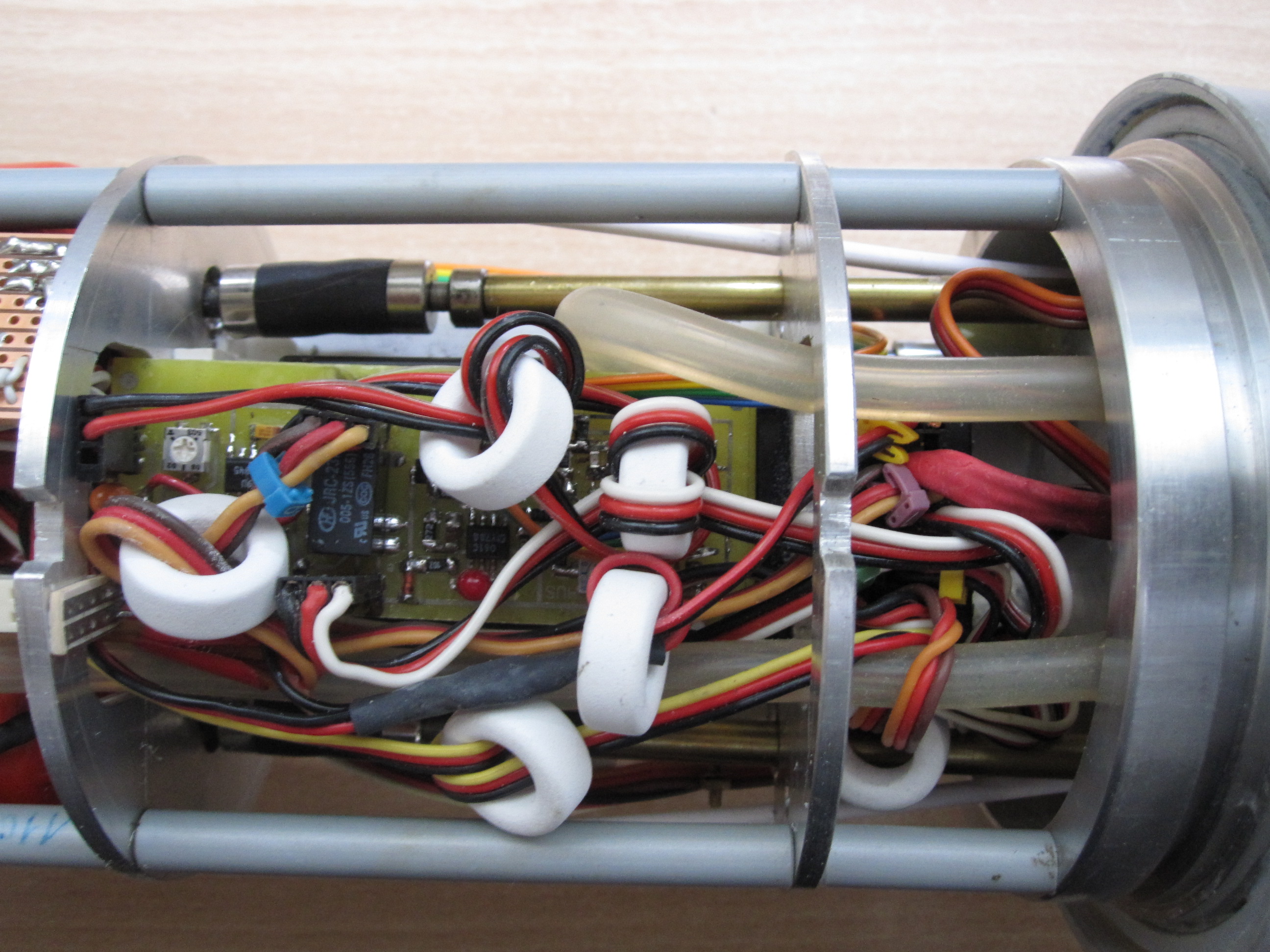
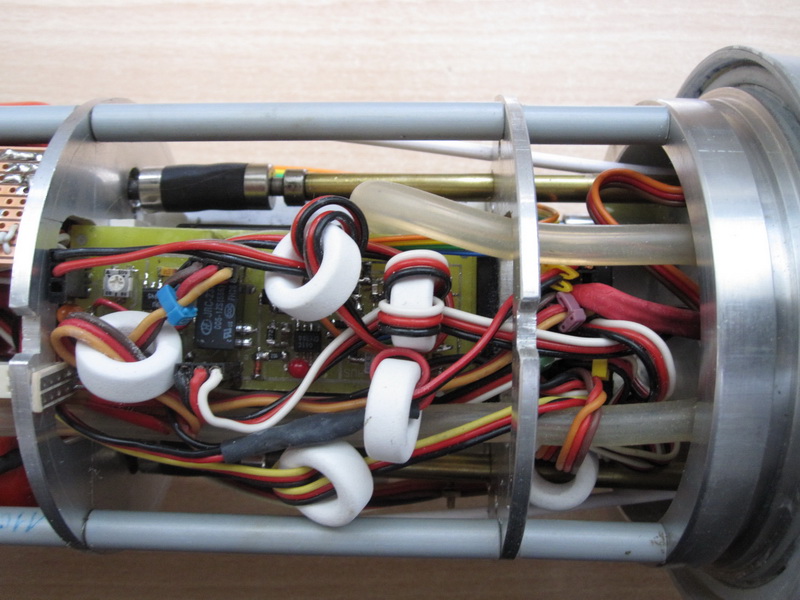
toujours vue de coté,les 2 derniers compartiments,et la c'est un peu le bordel
ou il y a marqué H et B, c'est la commande de
montée et descente du périscope commandée par
l'inverseur ROBBE (en rouge)
a cote a gauche,un moteur de servo qui entraine la vis sans fin du périscope, avec donc 2 micro interrupteur qui coupe le
mouvement en fin de course
derrière il y a encore 2 micro interrupteur qui commandent les éclairages (en plongée et en surface) si je laisse l'inverseur en fonction
Au dessus a droite, des connecteurs et derrière les connecteurs la
pompe Kawan
---------------------------------------------------

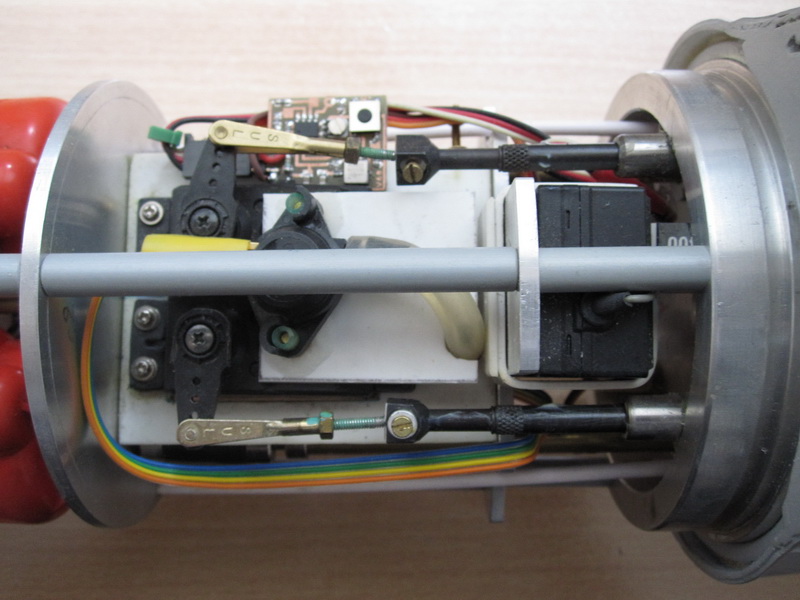
Vue de dessus,de gauche a droite , l'équerre blanche maintien ,
le contacteur de la poche baxter
la pompe vue de dessus
et le circuit du
détecteur d'eau
ensuite un autre
inverseur, qui sert au
réglage de mon plomb central,dessous il y a le servo inverseur
de la pompe et le
REGULATEUR UBEC-3A
---------------------------------------------------
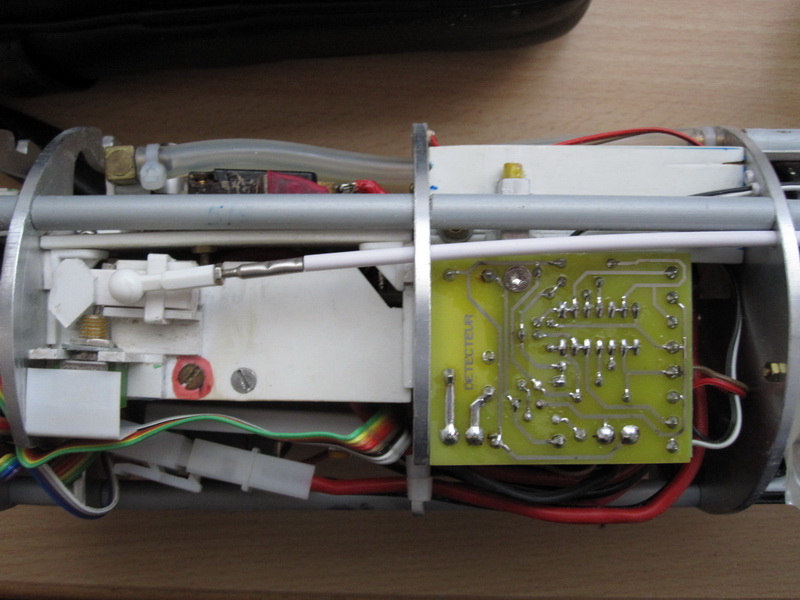
vue de coté de droite a gauche
le dessous du circuit imprimé de détection d'entrée d'eau
Detecto de Philippe LOUSSOUARN
le coupe circuit et derrière les 2 vis servent (point rouge le + et le -) ou tous les alimentations sont reliées
---------------------------------------------------
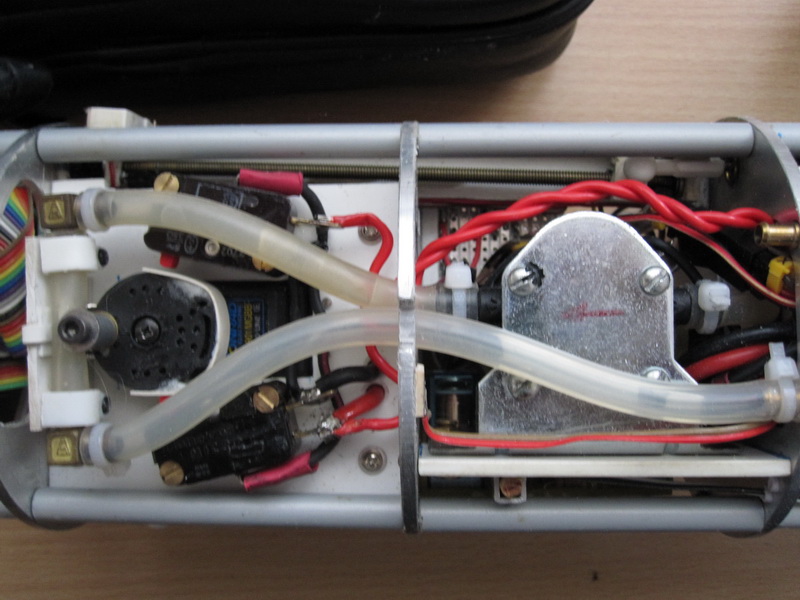
vue de dessous, de droite a gauche
la
pompe Kawan
et a gauche le servo qui commande la pompe avec le presse durite
---------------------------------------------------
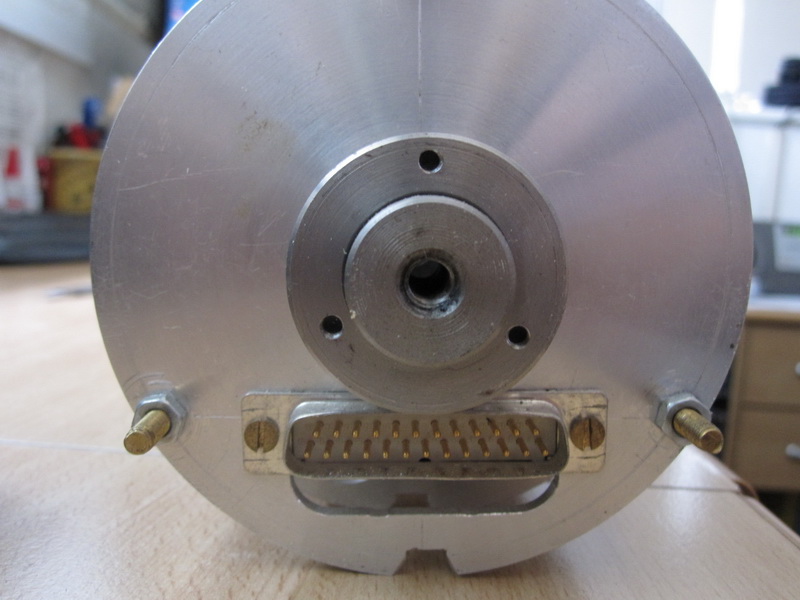
ça c'est le contacteur qui relie au bouchon fixe avant me permet de faire sortir les fils électriques a l'extérieur du tube, et j'ai gardé le système de serrage de ROBBE
voila, après vous direz que papy il se décarcasse pas pour votre curiosité

PS: lâchez-vous les gars, il faut que je rattrape,
les 27 pages de
STUART
les 17 de
Ironman2
et les 14 pages de
Jacky