Bonjour à tous,
Suite des travaux de la semaine.
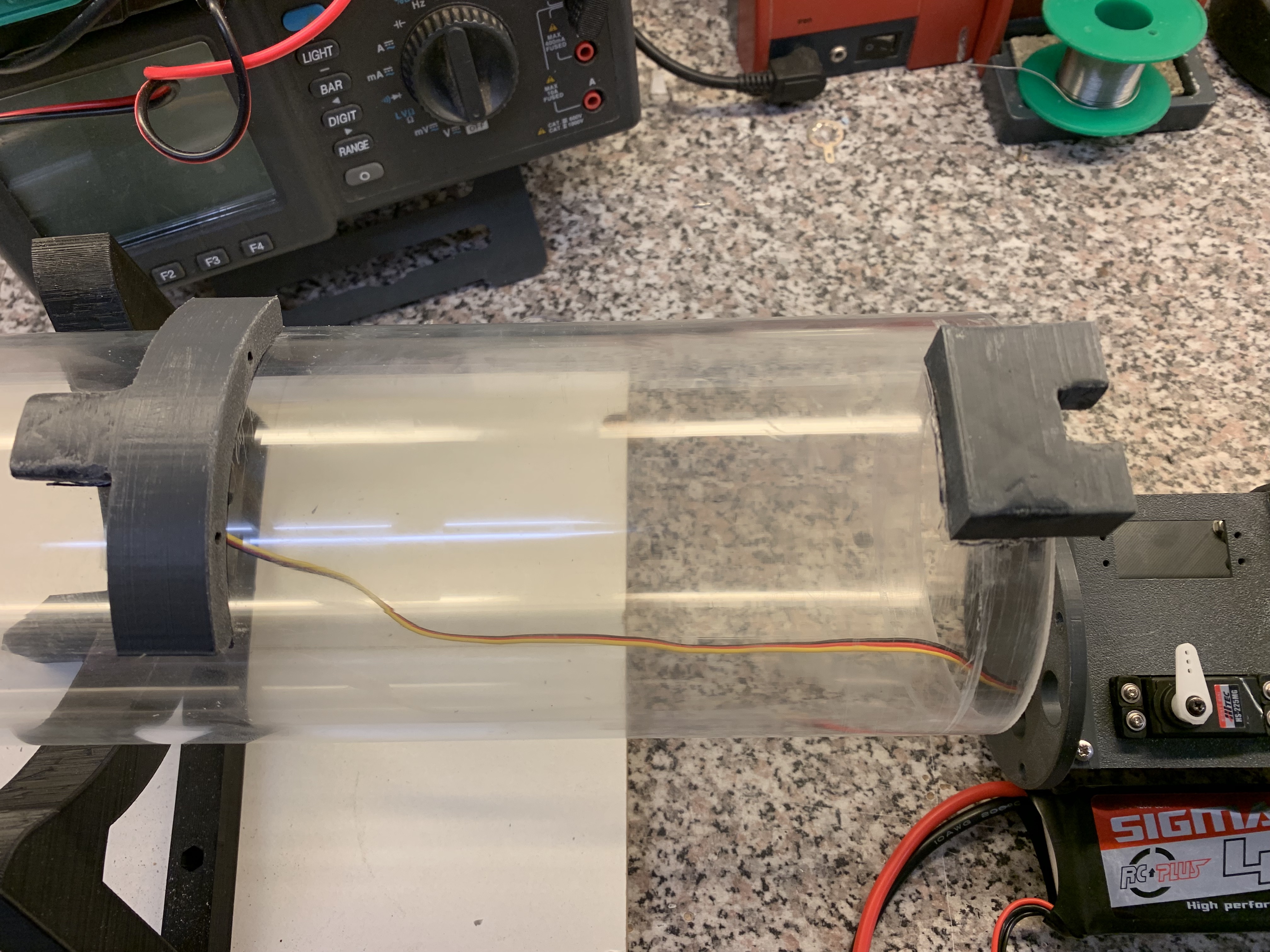
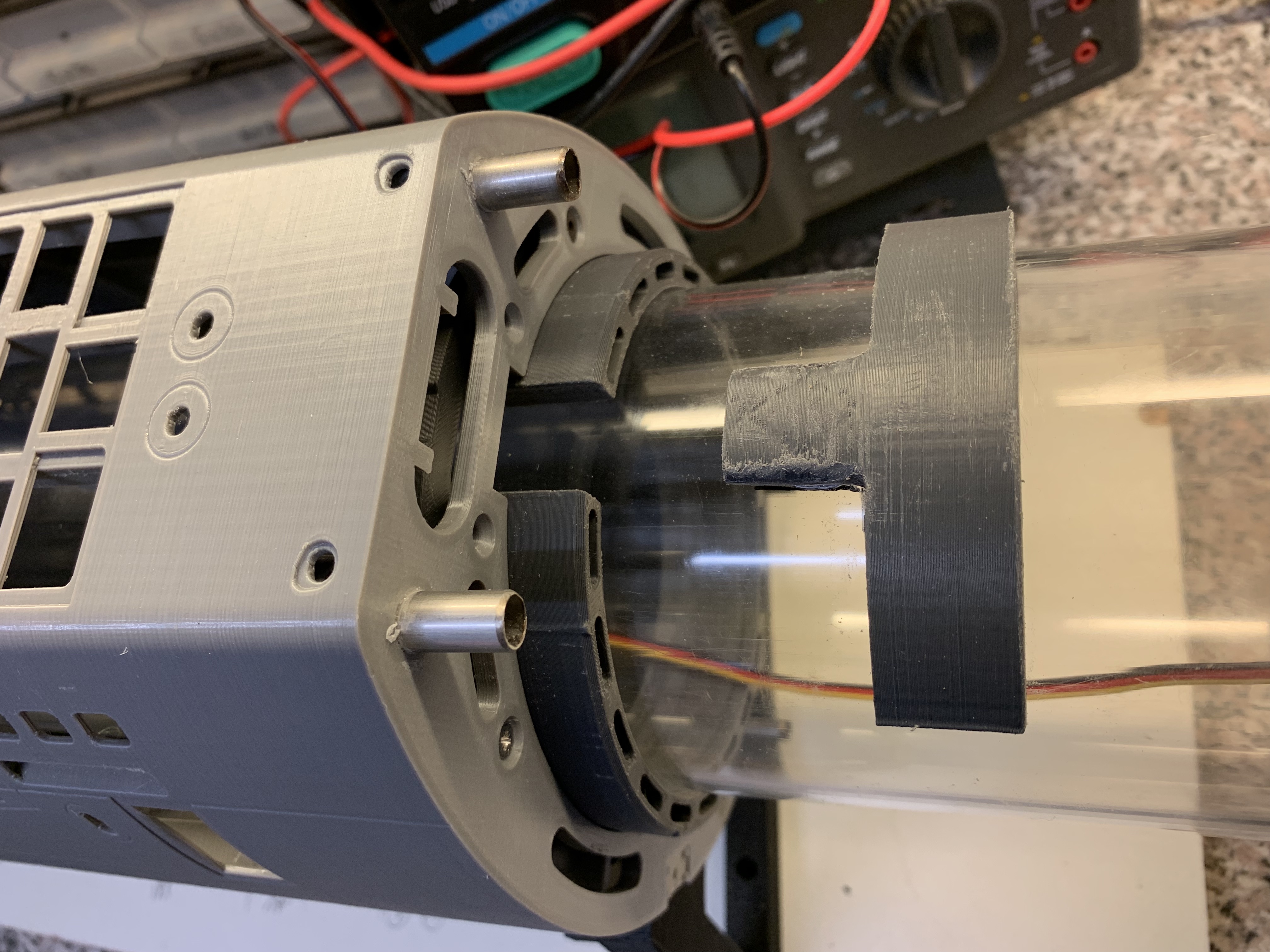
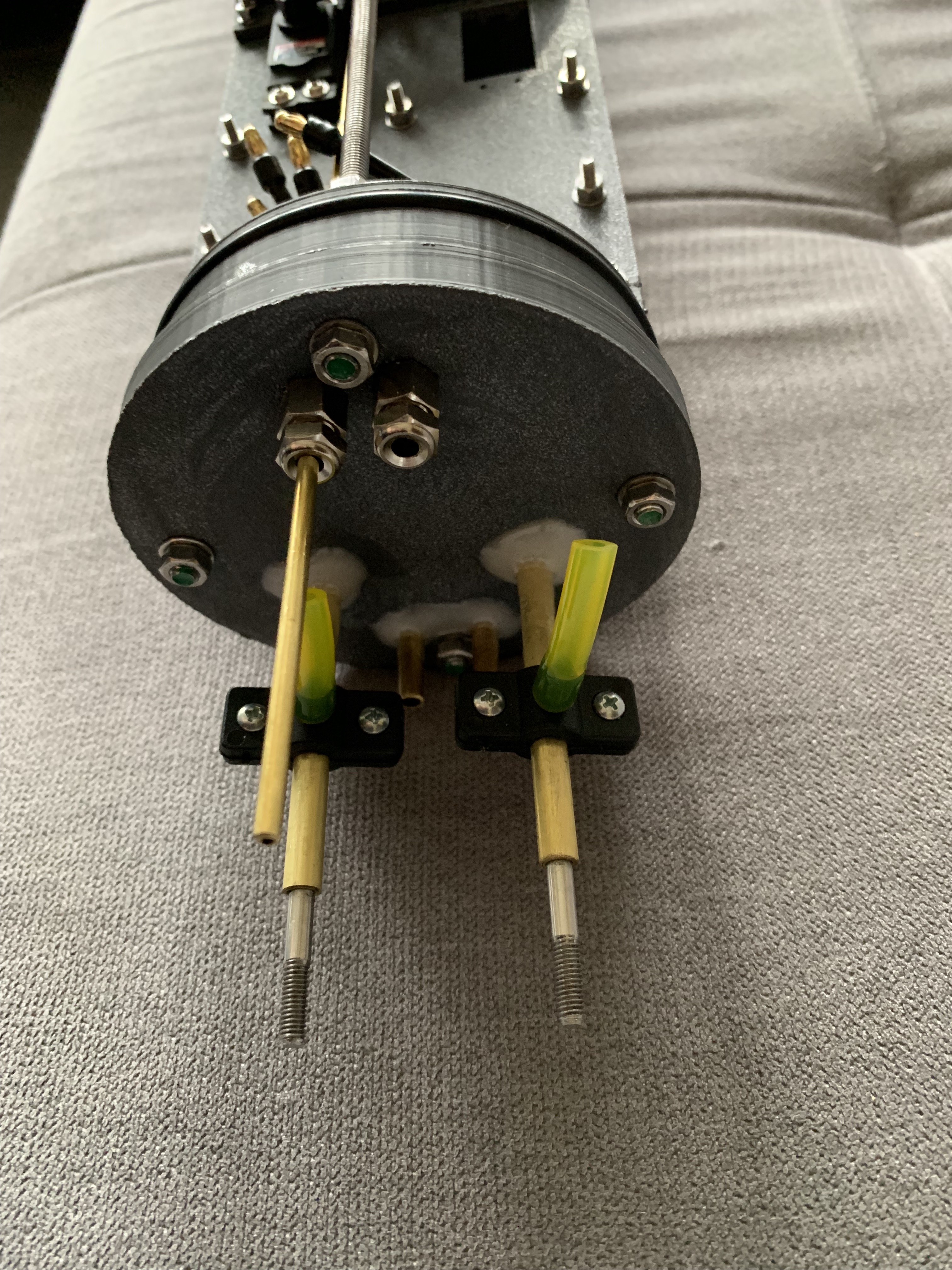
J'ai installé les 2 tubes d'étambot avec des graisseurs rapportés, ils sont courts car ils se connecteront sur les lignes d'arbres qui sont, elles, fixées sur la coque.
j'ai aussi collé les 2 tubes des prises d'eau en partie basse sous les tubes.
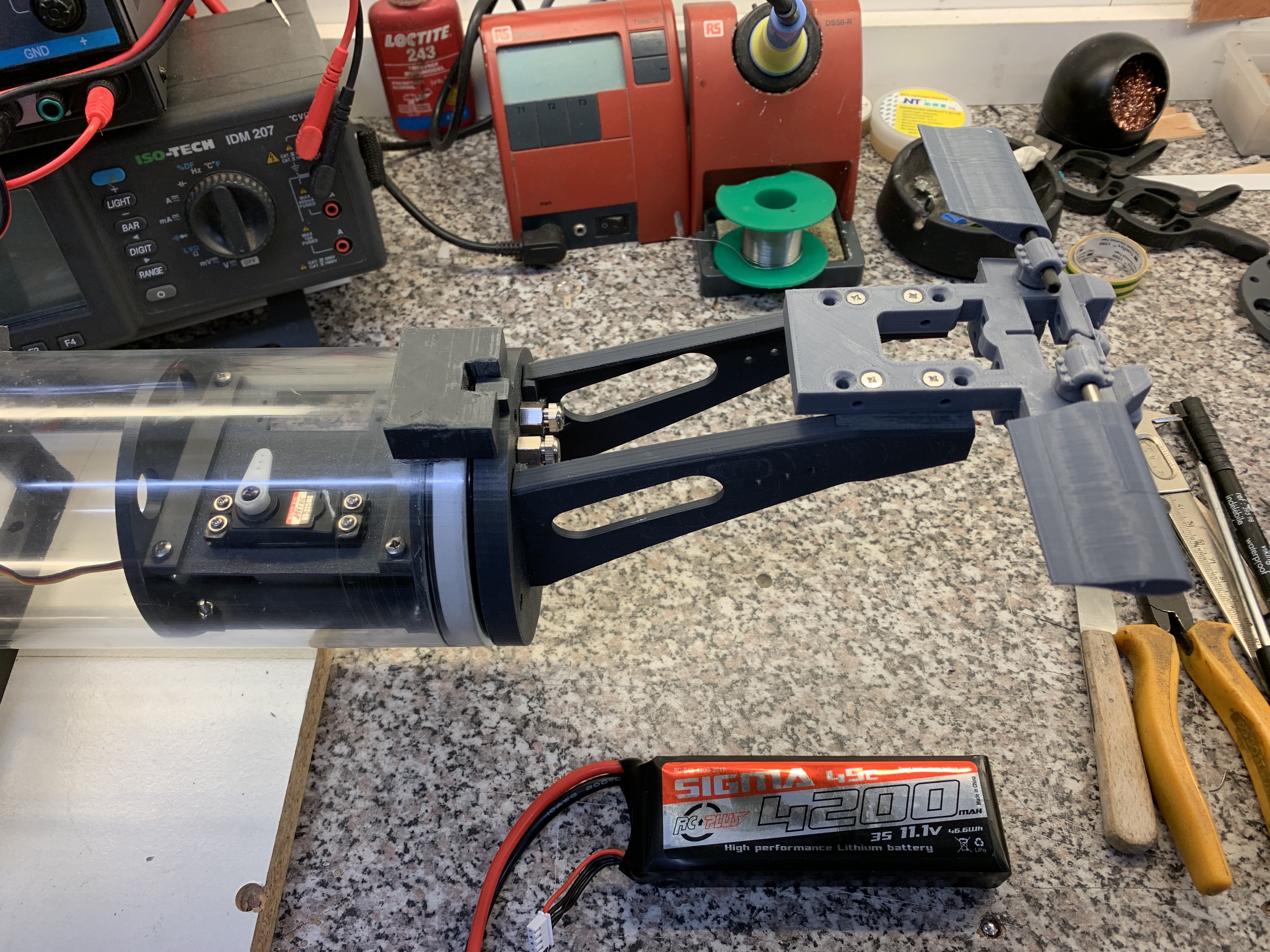
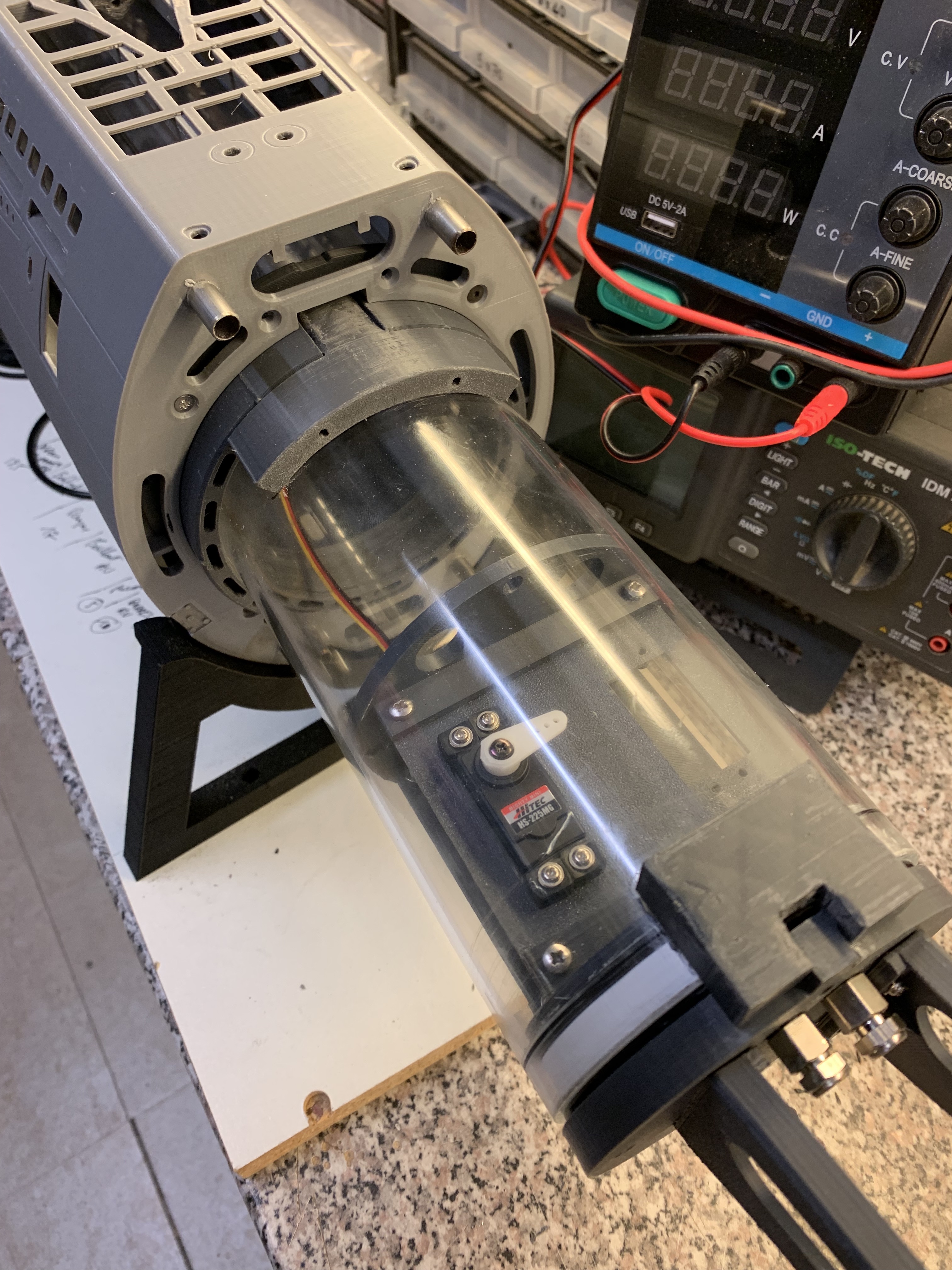
Les commandes du gouvernail et des barres de plongée AR sont en tube laiton de 3mm pour plus de rigidité.
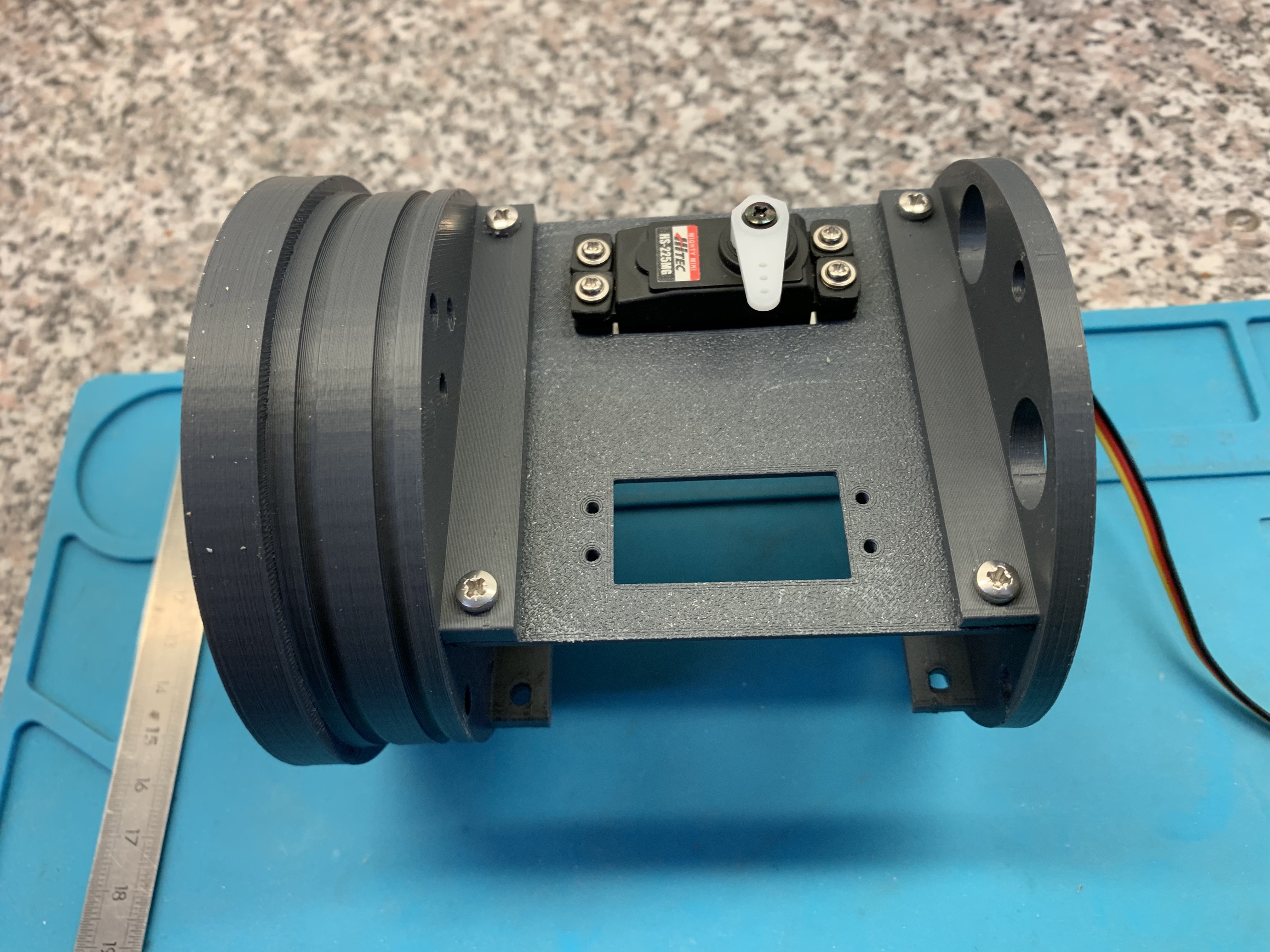
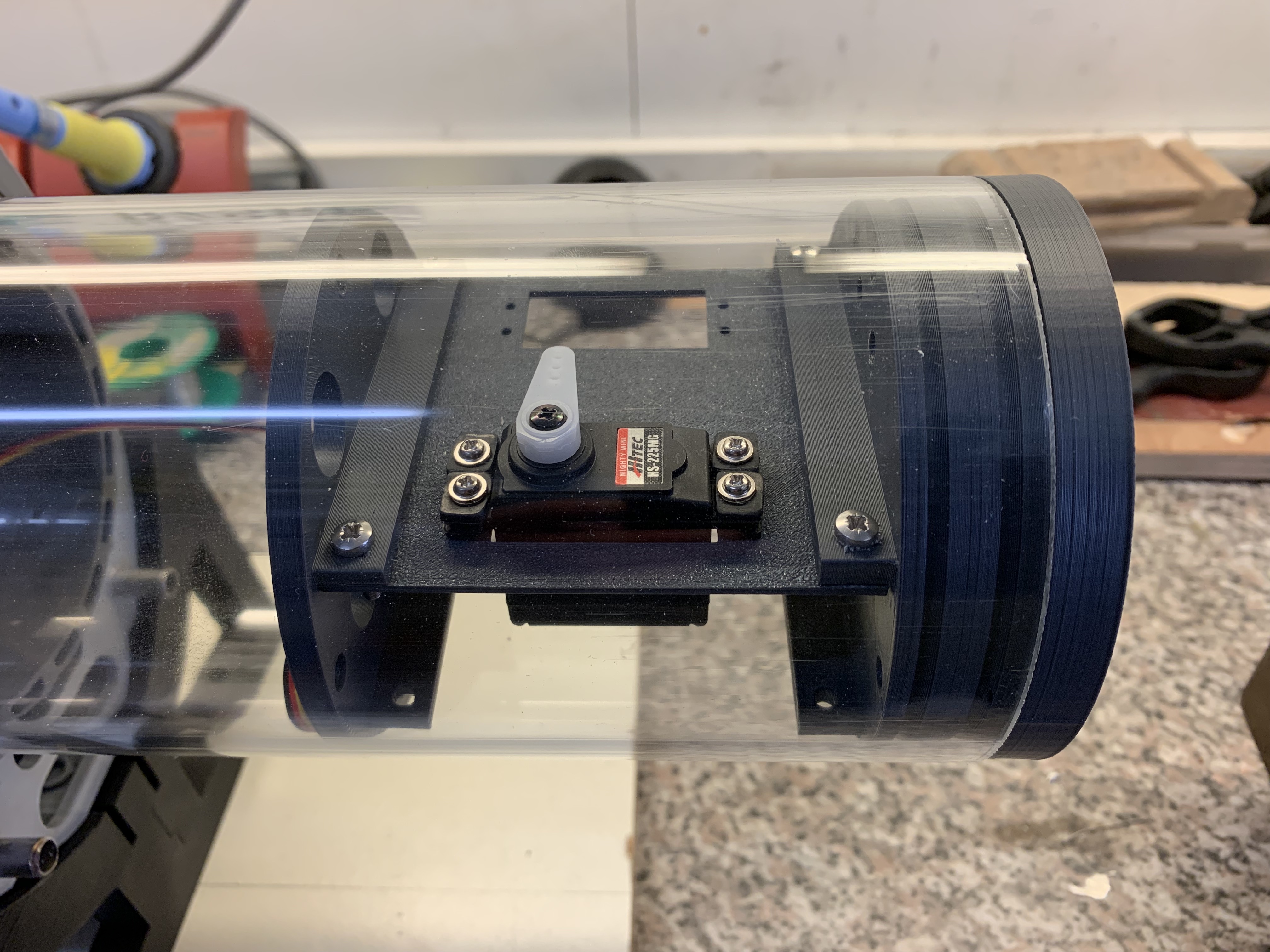
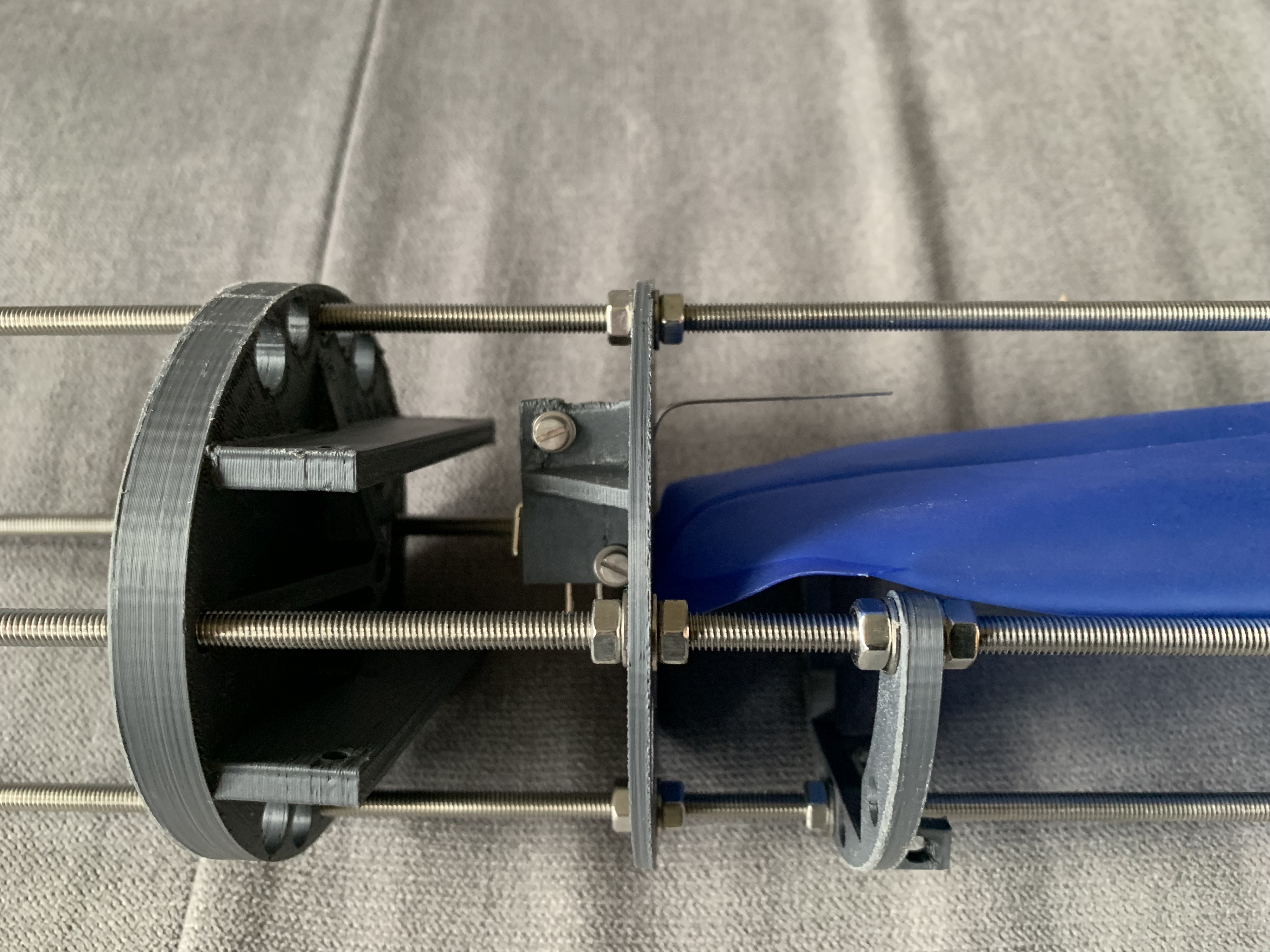
La partie supérieure avec les 2 servos et l'emplacement des futurs contrôleurs (pas encore reçus).
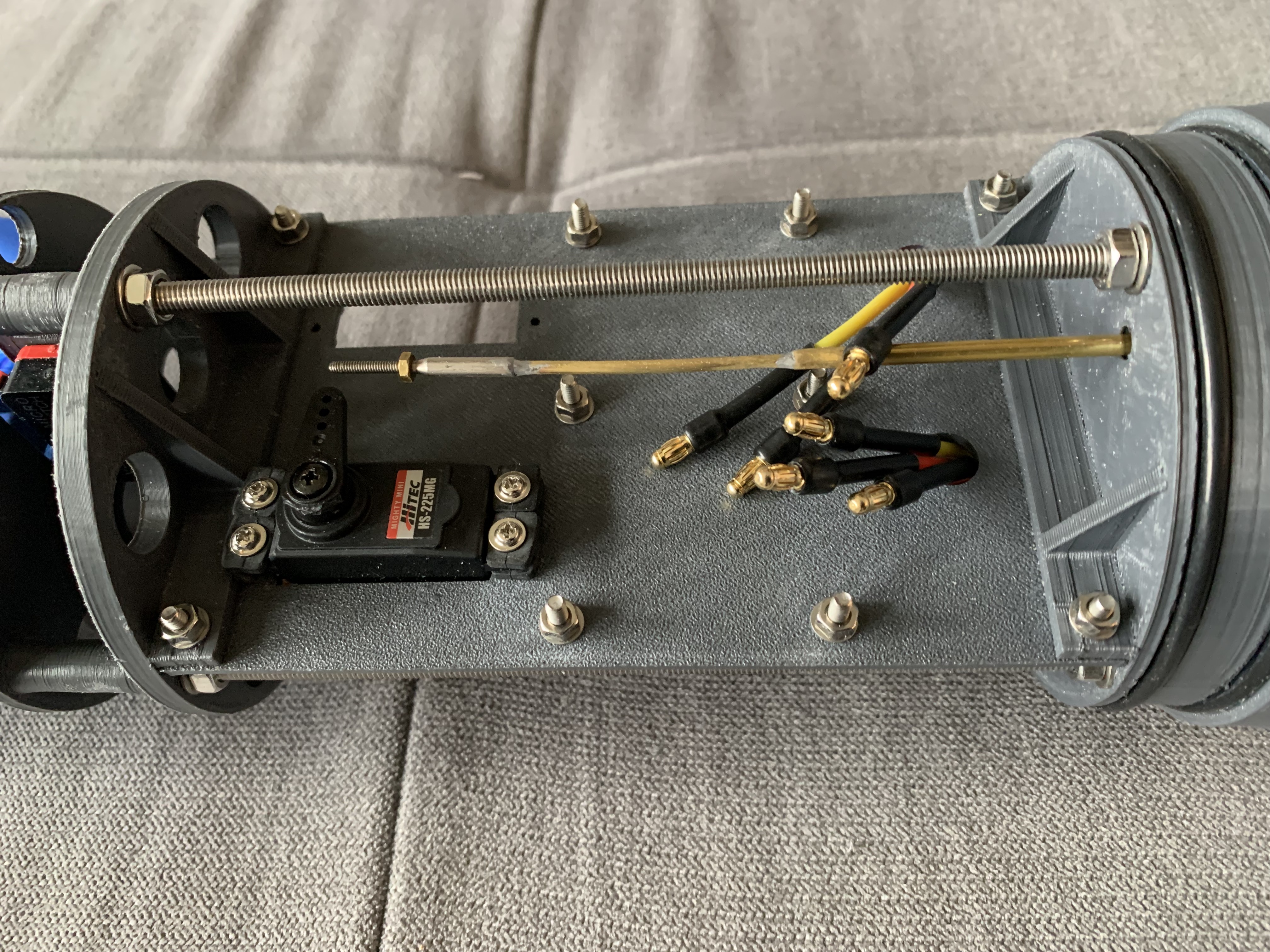
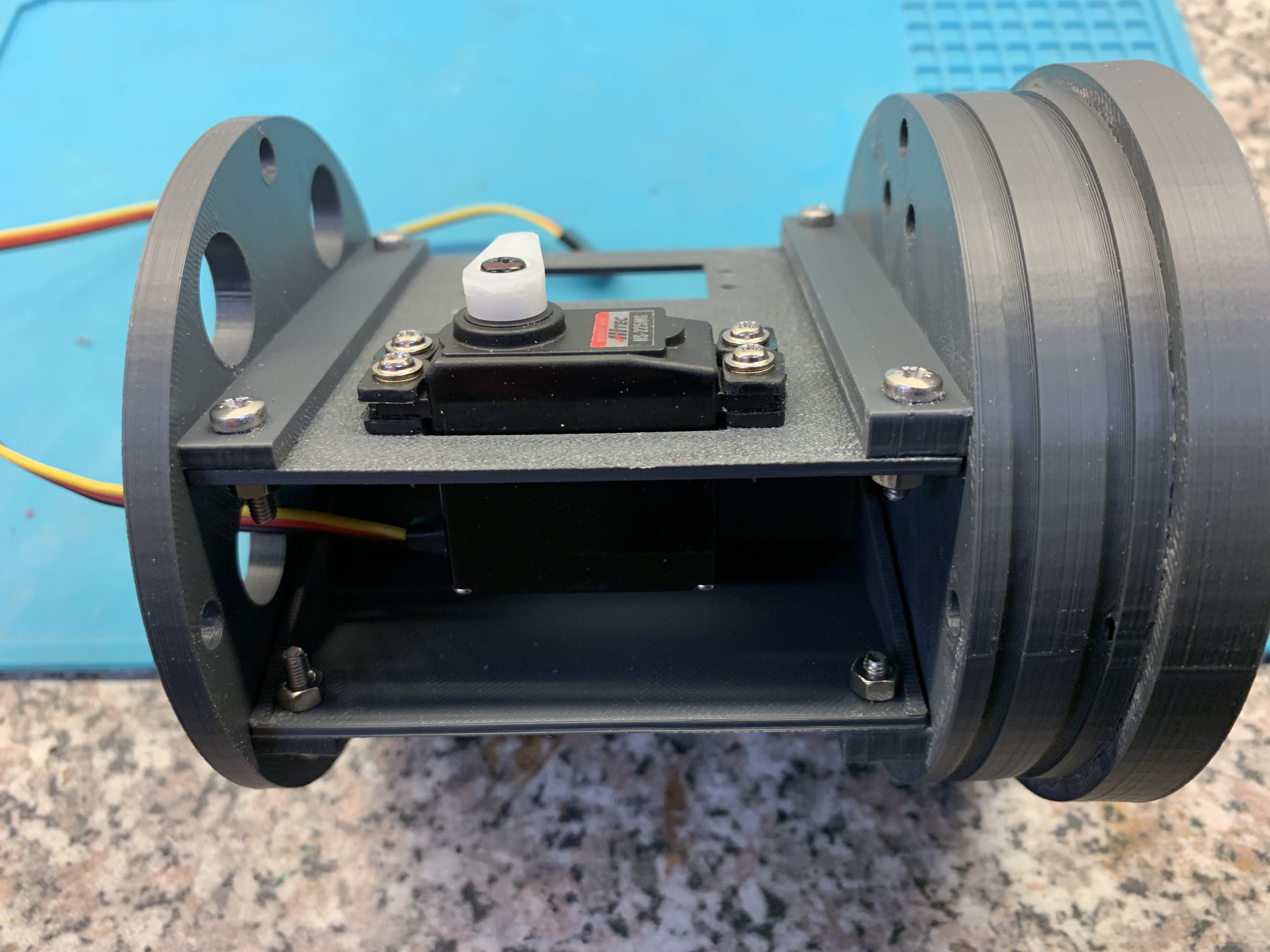
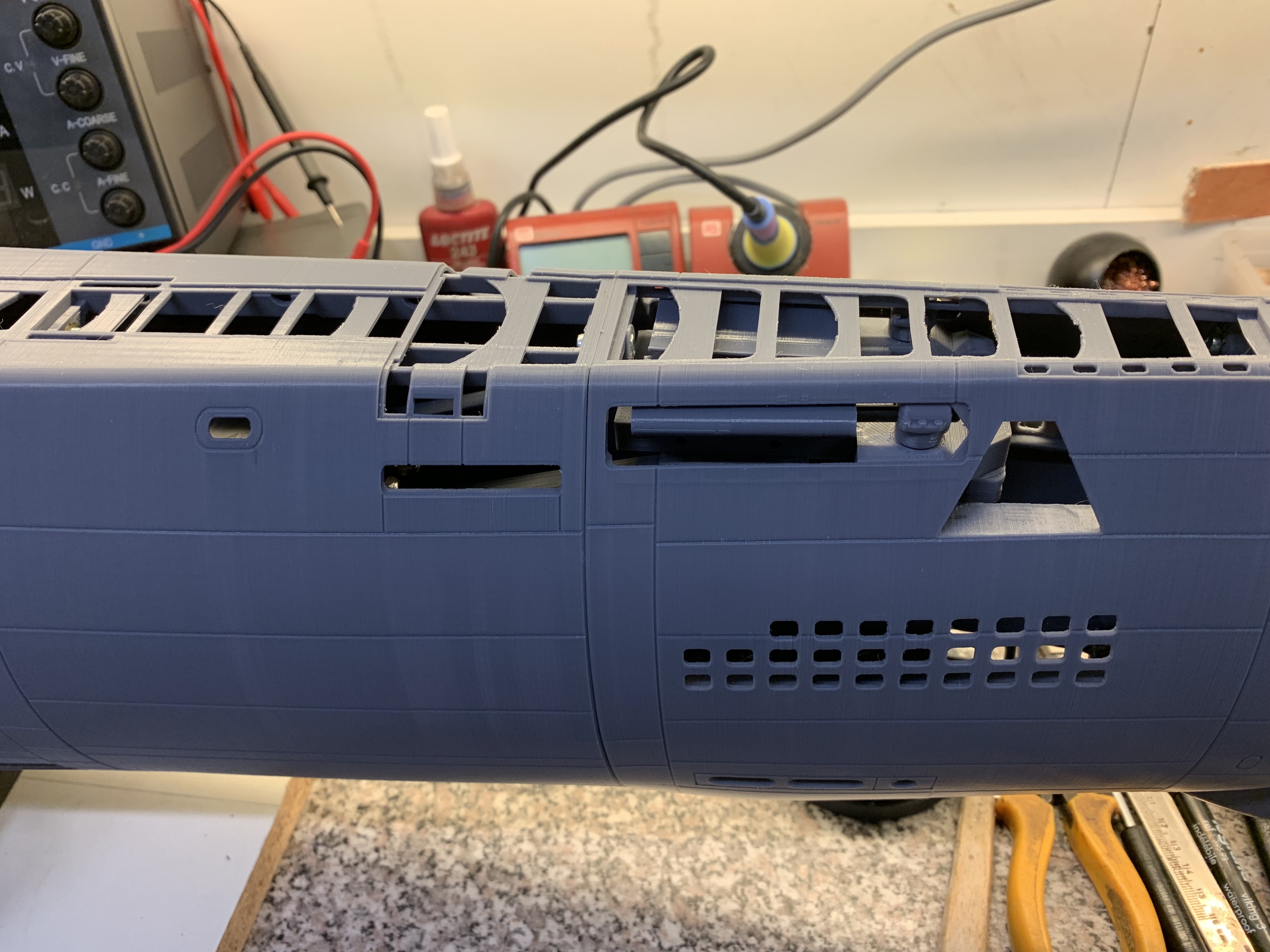
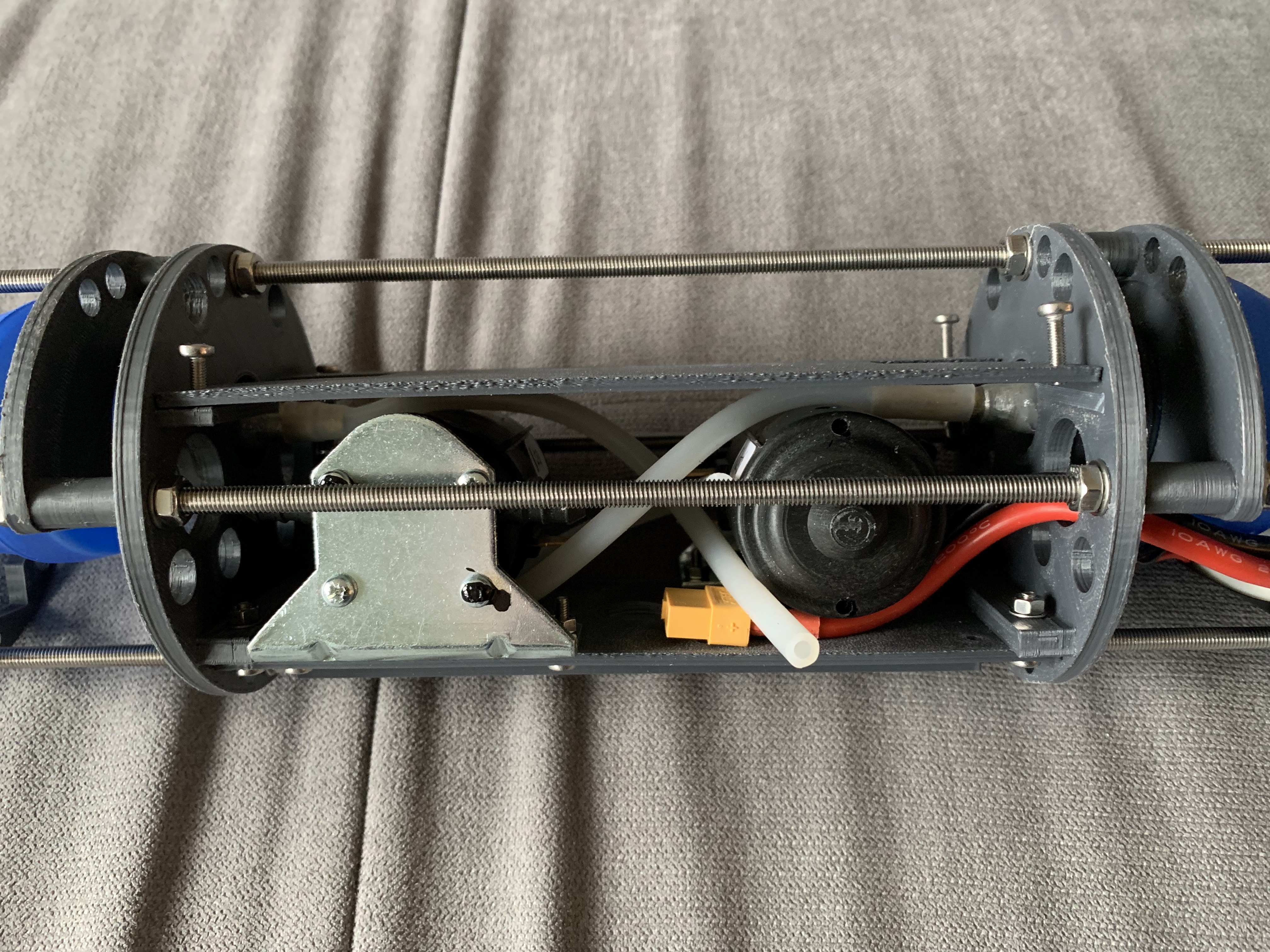
Le coté "moteurs" , je suis en train de fabriquer une platine qui supportera le servo de commande de la pompe du ballast AR ainsi que ses switchs.
Elle sera installée entre les 2 servos.

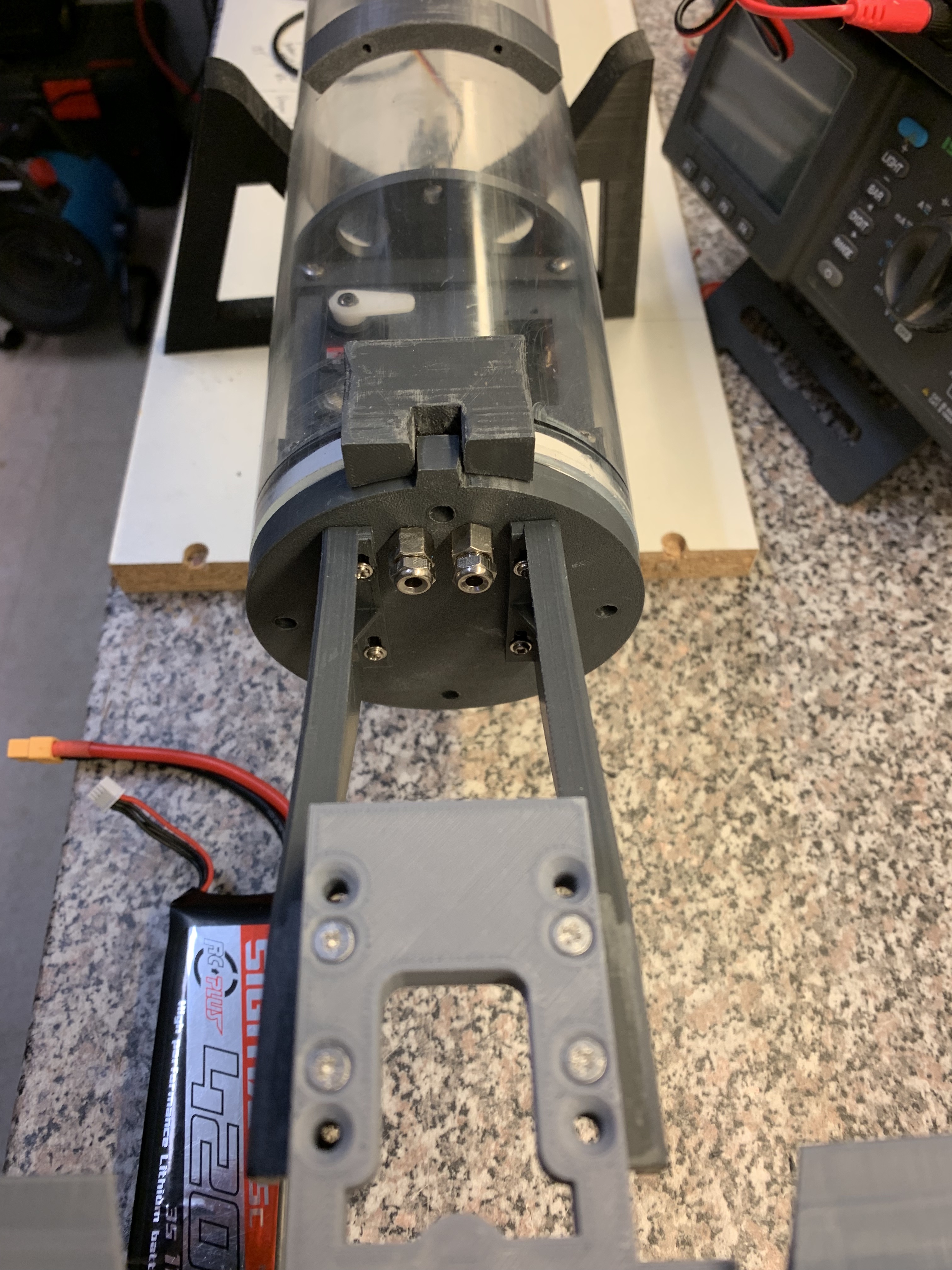
Le switch de sécurité du remplissage est fixé derrière le ballast sur un couple.
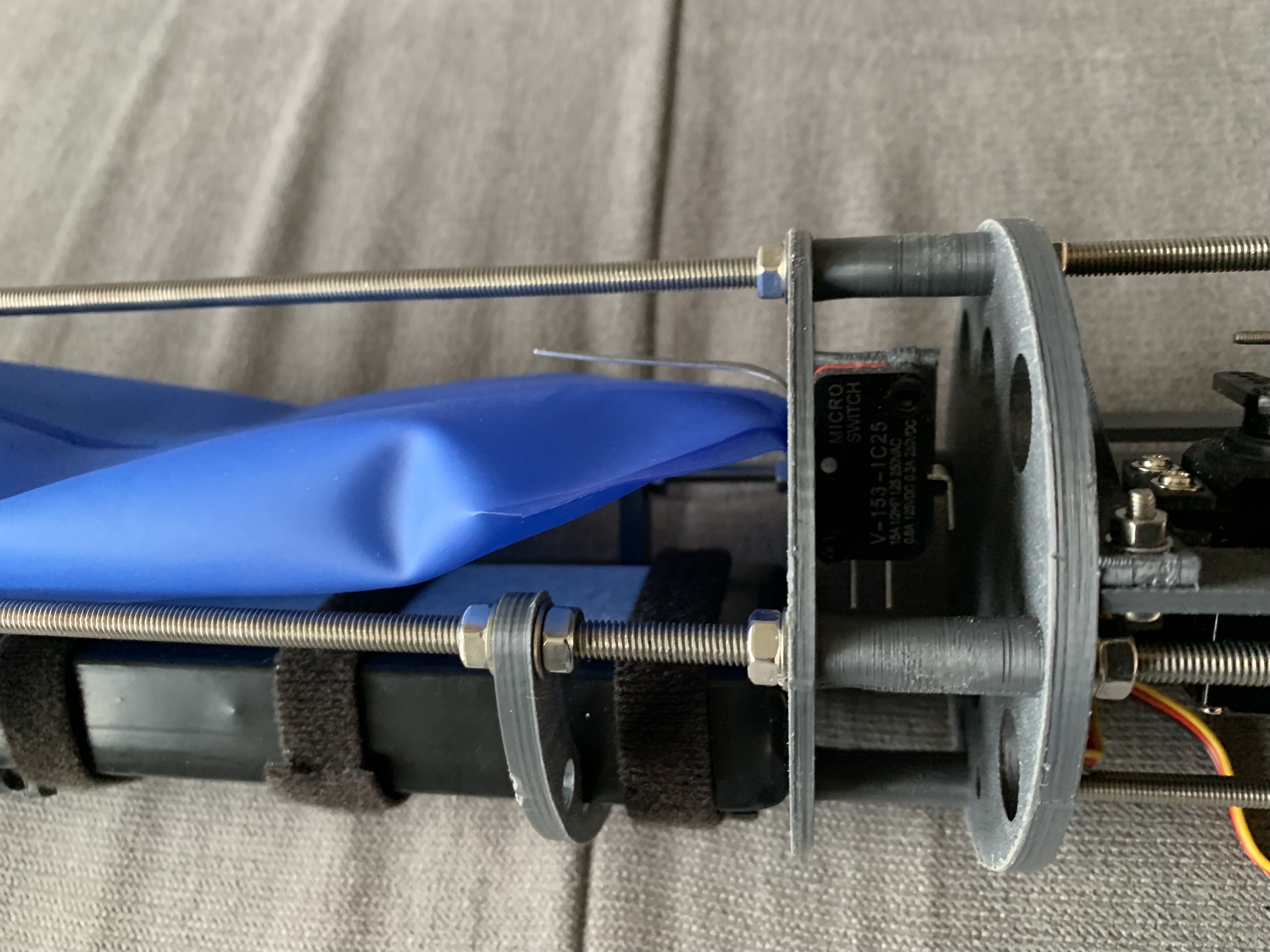
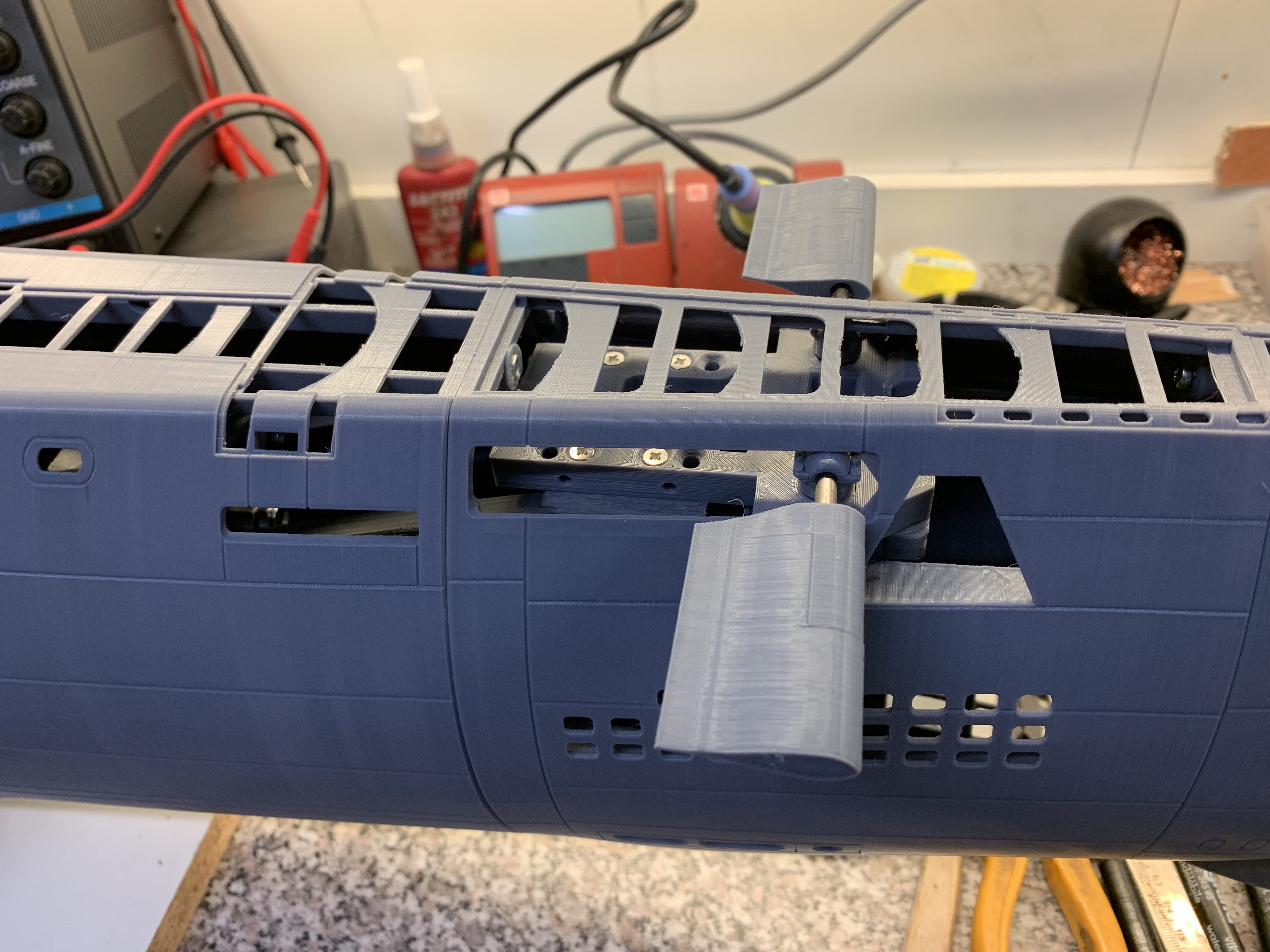
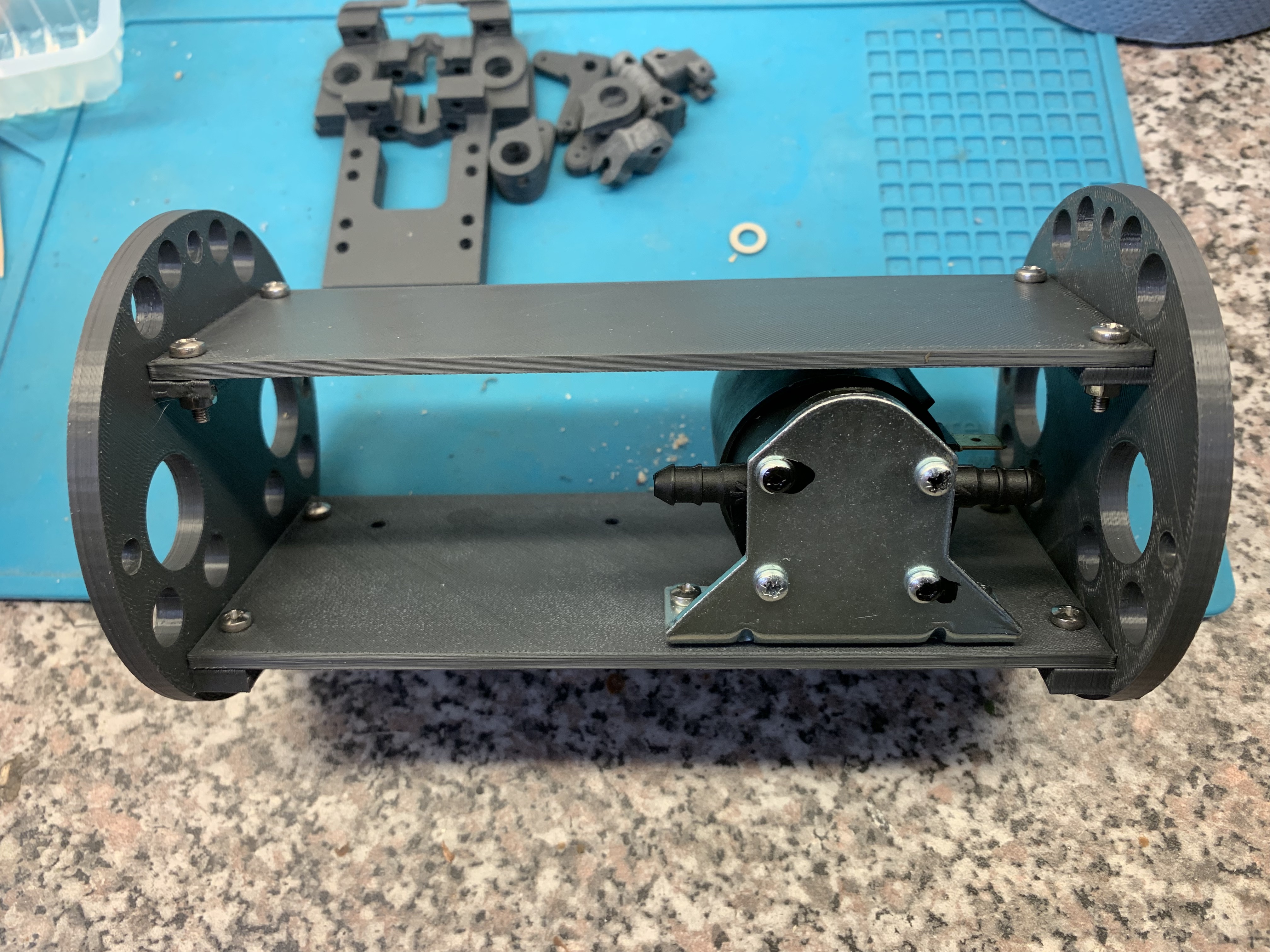
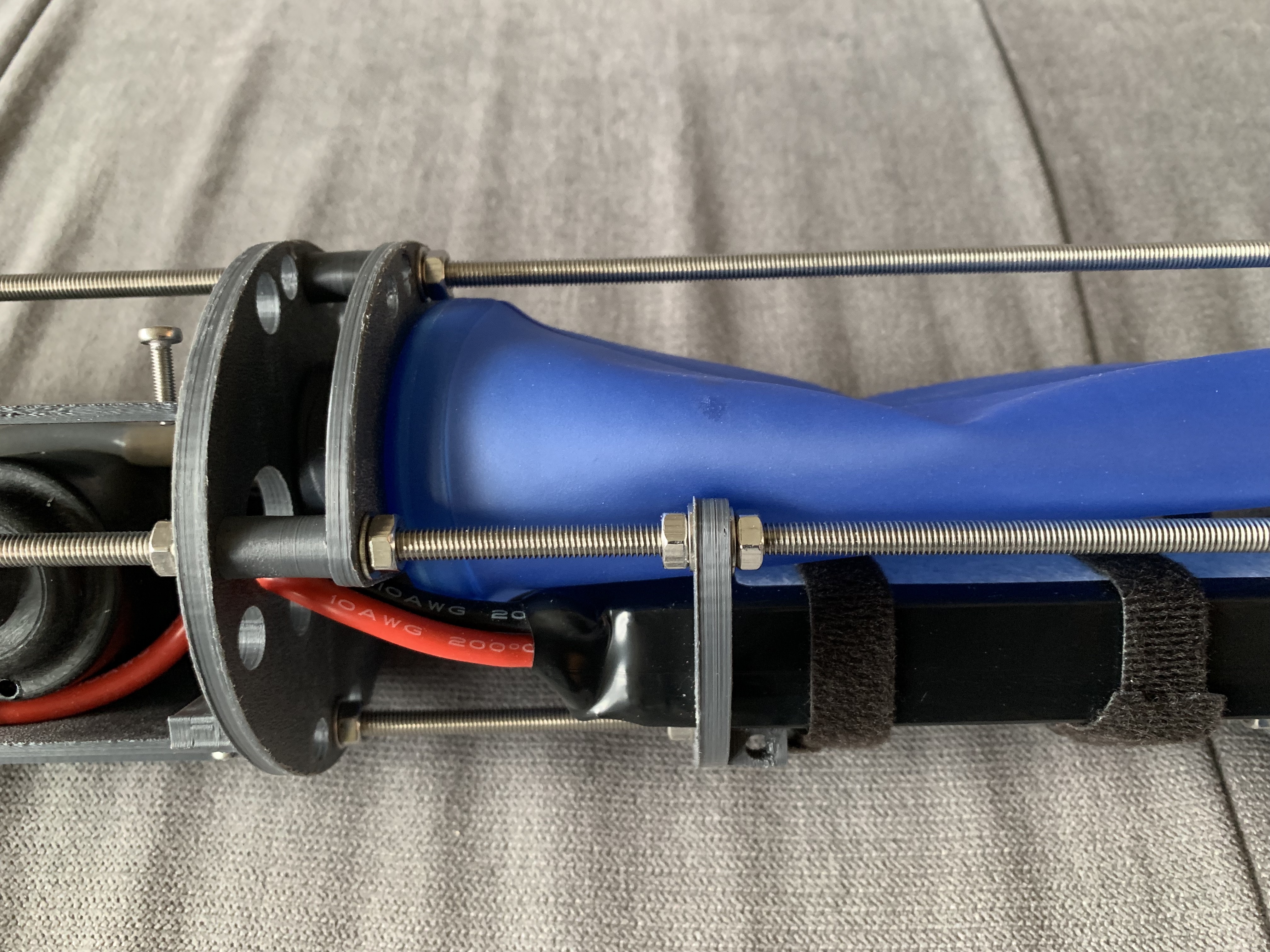
Le ballast AR , j'ai utilisé une "gourde" souple de chez Decathlon de 500ml, il suffit de virer l'embout et de le remplacer par du tube collé à l'époxy.
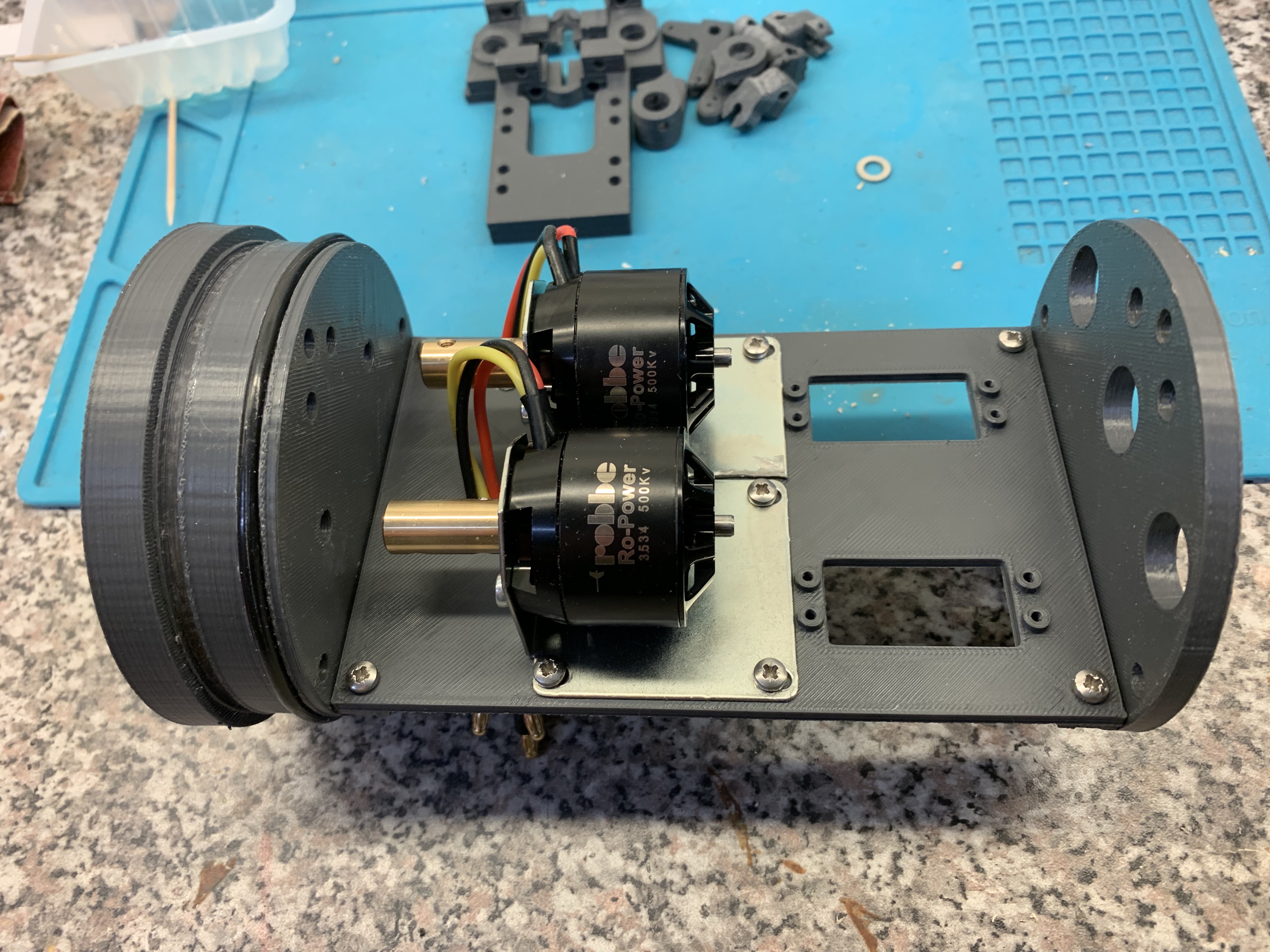
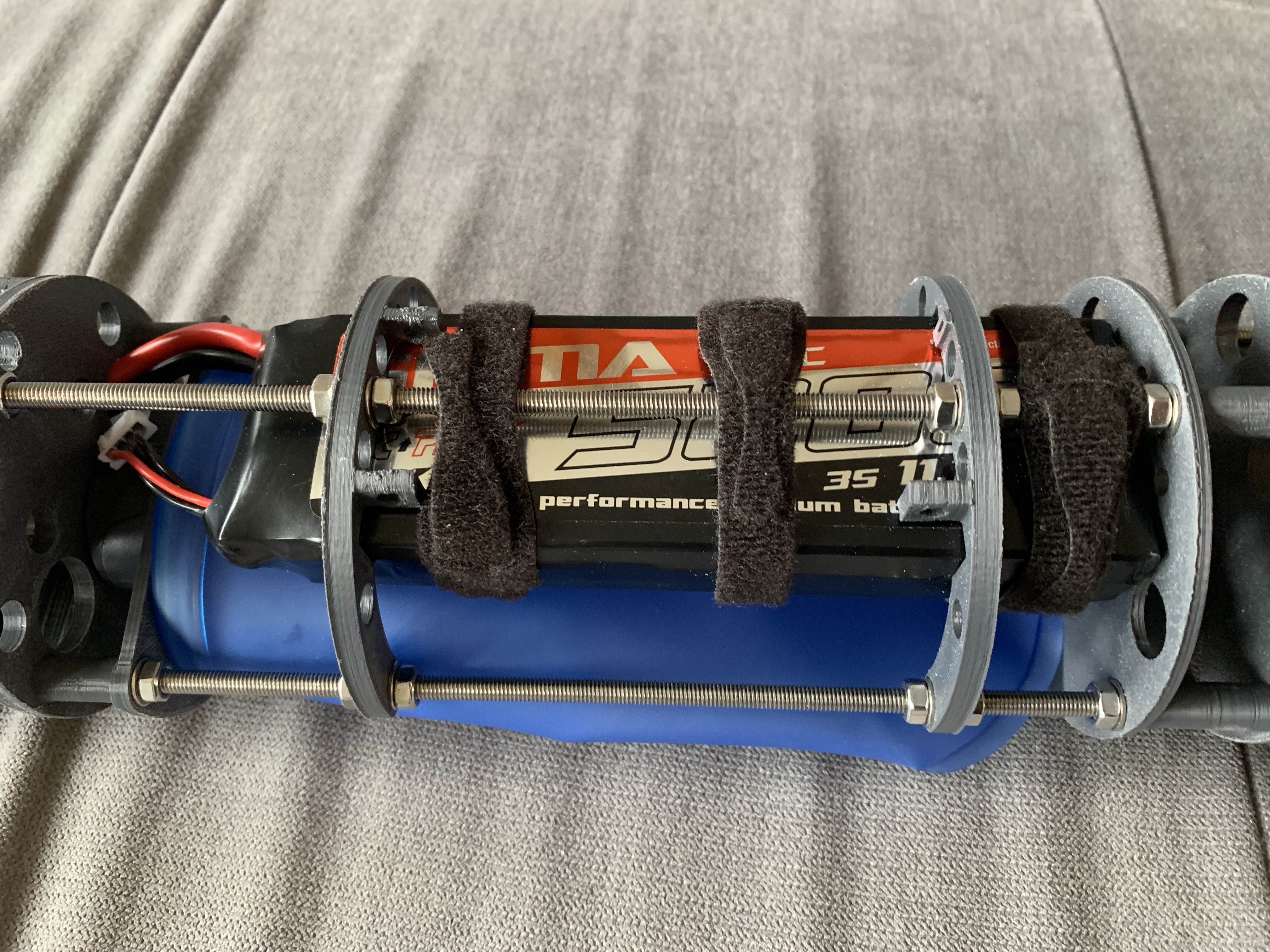
Dessous j'ai installé une première batterie Lipo 3S 5200mAh qui alimente le moteur droit ainsi que la pompe du ballast AR.
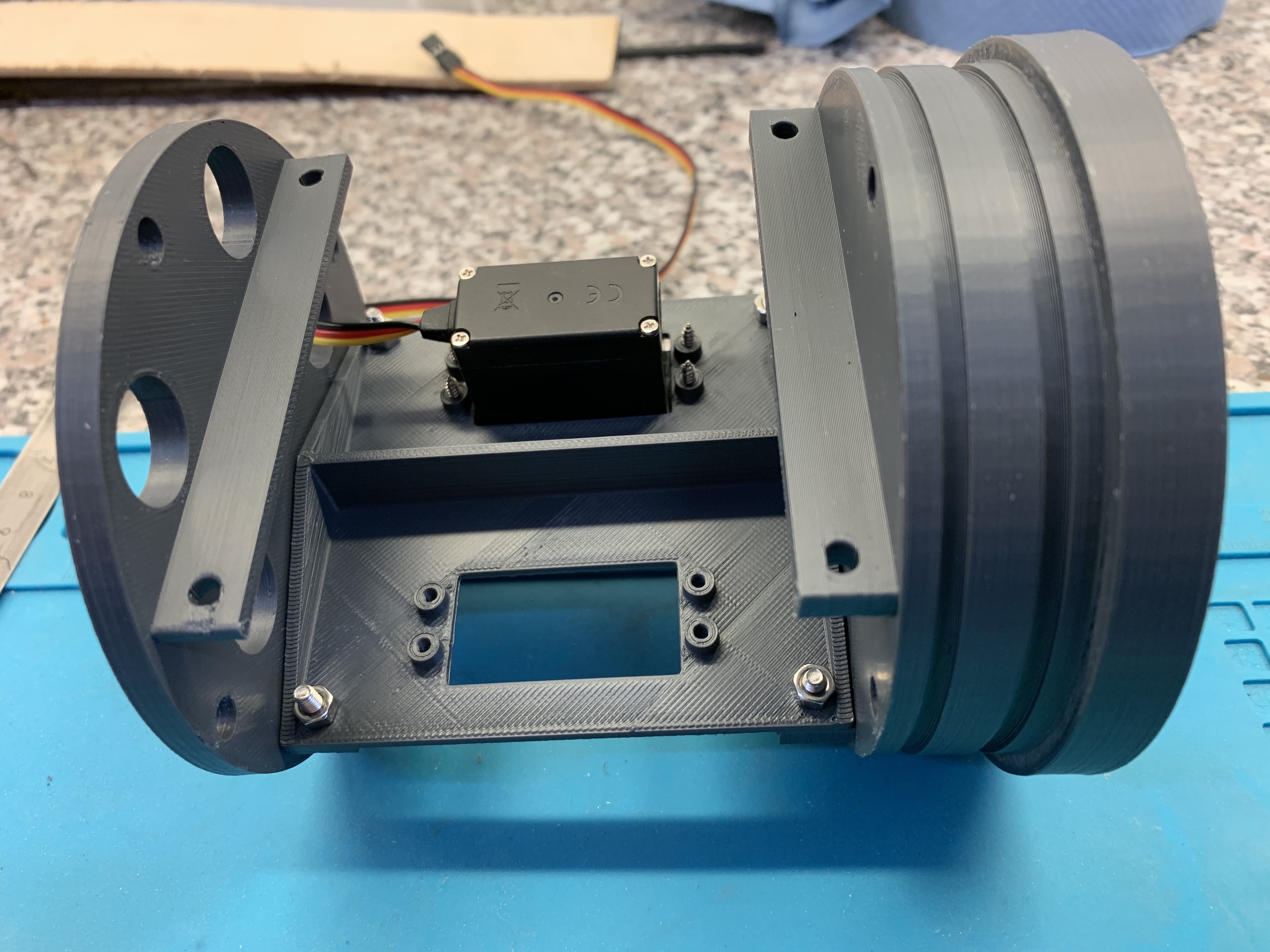
La partie centrale avec les 2 pompes des ballast, le deuxième servo pour la pompe AV sera placé sur la platine supérieure.
Le dessous

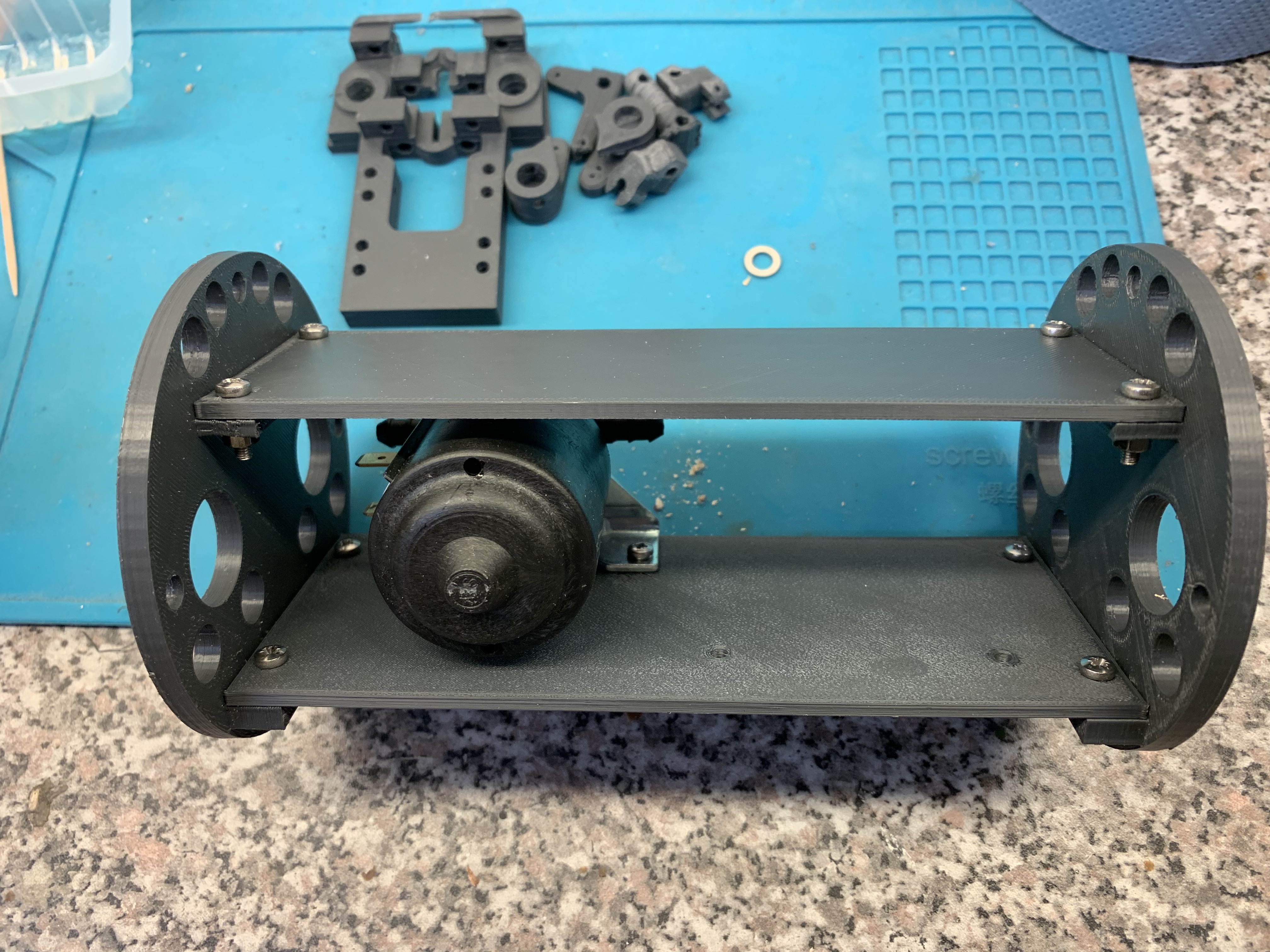
Le ballast AV avec, en dessous, les supports de la deuxième batterie Lipo pour le moteur gauche et la pompe du ballast AV.


Le switch de sécurité du ballast AV
Le tout assemblé avec des tiges filetées inox M5, la partie avant avec le récepteur, interrupteur et autre sera pour plus tard.

A suivre.....