Micro Actuateur Linéaire
Publié : 17 nov. 2023 14:41
bonjour à tous,
j'ai trouvé un petit moteur pour objectif (zoom) de smartphone, pas à pas bipolaire (0.3 E pièce seulement).
Il tient sur le bout de l'index.
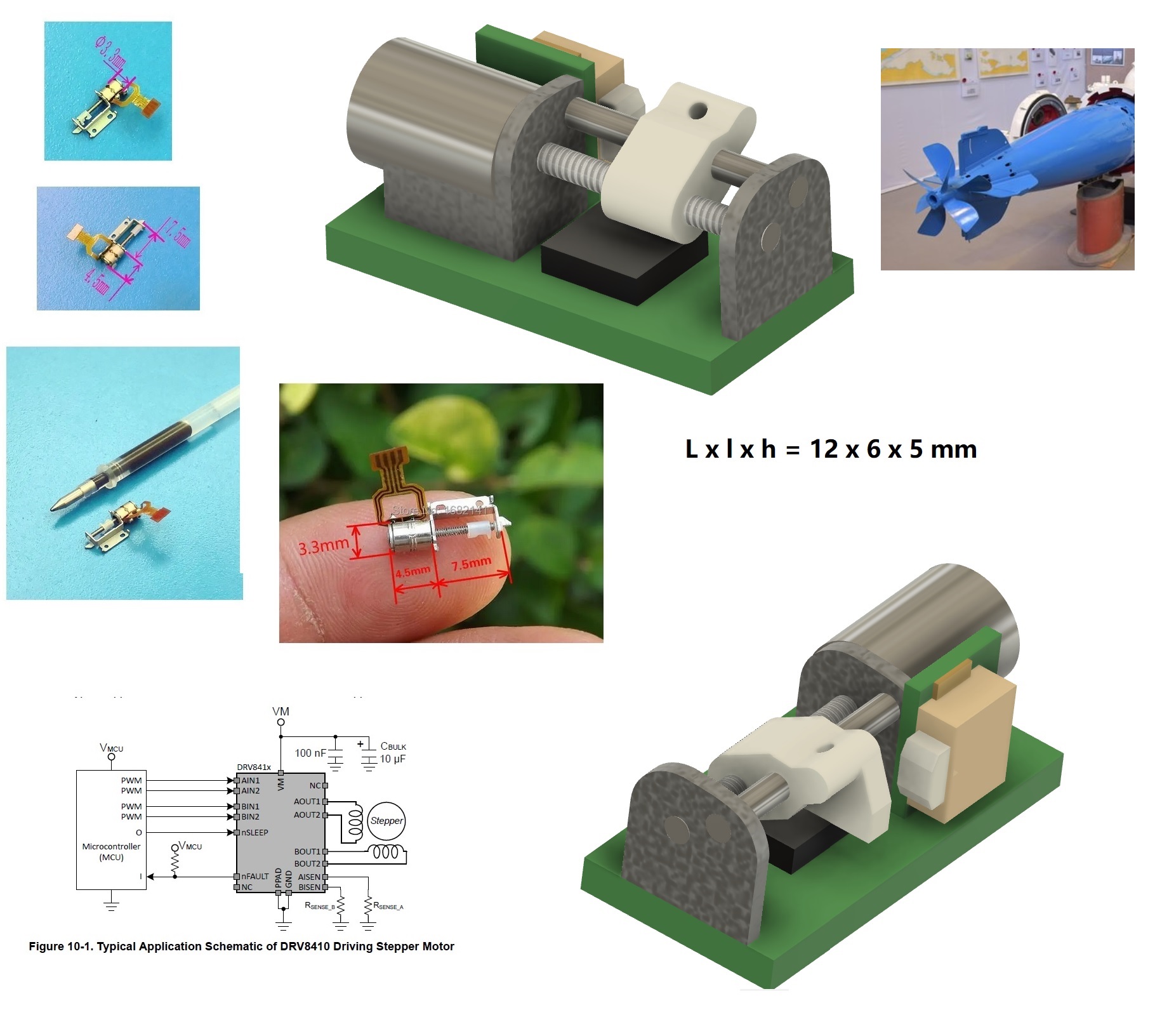
Il faut enlever l'armature métallique et le modifier comme sur le dessin 3D.
Cela fait un petit servo de 12x6x5 mm.
Une tige filetée 0.8 mm pas 0.2 mm déplace le curseur, donc 0.2 mm d'avance par tour et 5 microns au minimum.
Il permettra les commandes de gouvernes sur des tout petits sous marins.
J'ai pensé à une version 2 de la torpille RC qui ressemblera à la torpille bleue sur la photo.
donc plus de servo magnétique; hélices plus accessibles et dérives bloquées qui permettront de tourner à
haute vitesse, de la maintenir sous l'eau voir de la manier comme un petit sous marin.
Le rectangle en vert est un circuit et le cube noir 3x3 mm = drv8410, driver de moteur bipolaire 4 fils.
Il y aura 3 résistances en 402 et deux condensateur en 603, et des pads pour brancher des fils sur la carte mère.
Les 2 servos passent bien dans le tube (14 mm de diamètre interne) et seront collés sur le circuit.
En gris des supports imprimés ABS et collés et en blanc le curseur mobile en POM usiné à la CNC.
Le rail de guidage est une tige inox 0.8 mm.
Il y a un switch on/off cms Omron B3U.
A la mise sous tension, le curseur se déplace vers le switch qui l’arrête. Cela défini le point zéro.
Ensuite selon la longueur de la course on connaît le nombre de tours N pour le point milieu à d0 (d0 =0.2xN mm)
Pour les gouvernes j'utilise un tube téflon de 1mm de diamètre externe dans lequel passe un jonc carbone souple 0.3mm.
Le frottement est très faible et un peu de graisse silicone hydrophobe vers le bout fera l'étanchéité.
Le tube rectiligne passera sur le coté du moteur et des pignons du haut.
On peut faire un micro soufflet avec des petits tubes silicone très souples (articles pour la pêche) engainés de façon
concentriques, les plus intérieurs collent sur le jonc et le tube téflon, le plus externe fait soufflet.
Le moteur sera comme celui de la vidéo, un 6mm réducteur planétaire 5:1
Nouvelles hélices à faible cavitation.
j'ai trouvé un petit moteur pour objectif (zoom) de smartphone, pas à pas bipolaire (0.3 E pièce seulement).
Il tient sur le bout de l'index.
Il faut enlever l'armature métallique et le modifier comme sur le dessin 3D.
Cela fait un petit servo de 12x6x5 mm.
Une tige filetée 0.8 mm pas 0.2 mm déplace le curseur, donc 0.2 mm d'avance par tour et 5 microns au minimum.
Il permettra les commandes de gouvernes sur des tout petits sous marins.
J'ai pensé à une version 2 de la torpille RC qui ressemblera à la torpille bleue sur la photo.
donc plus de servo magnétique; hélices plus accessibles et dérives bloquées qui permettront de tourner à
haute vitesse, de la maintenir sous l'eau voir de la manier comme un petit sous marin.
Le rectangle en vert est un circuit et le cube noir 3x3 mm = drv8410, driver de moteur bipolaire 4 fils.
Il y aura 3 résistances en 402 et deux condensateur en 603, et des pads pour brancher des fils sur la carte mère.
Les 2 servos passent bien dans le tube (14 mm de diamètre interne) et seront collés sur le circuit.
En gris des supports imprimés ABS et collés et en blanc le curseur mobile en POM usiné à la CNC.
Le rail de guidage est une tige inox 0.8 mm.
Il y a un switch on/off cms Omron B3U.
A la mise sous tension, le curseur se déplace vers le switch qui l’arrête. Cela défini le point zéro.
Ensuite selon la longueur de la course on connaît le nombre de tours N pour le point milieu à d0 (d0 =0.2xN mm)
Pour les gouvernes j'utilise un tube téflon de 1mm de diamètre externe dans lequel passe un jonc carbone souple 0.3mm.
Le frottement est très faible et un peu de graisse silicone hydrophobe vers le bout fera l'étanchéité.
Le tube rectiligne passera sur le coté du moteur et des pignons du haut.
On peut faire un micro soufflet avec des petits tubes silicone très souples (articles pour la pêche) engainés de façon
concentriques, les plus intérieurs collent sur le jonc et le tube téflon, le plus externe fait soufflet.
Le moteur sera comme celui de la vidéo, un 6mm réducteur planétaire 5:1
Nouvelles hélices à faible cavitation.